在弧矢方向偏离2.1mm,IMA:-2.115,0.000mm为所成的像点在子午方向无偏离,在弧矢方向偏离-2.115mm。如图3a至图3c所示,在按照上述方式设计由成像物镜6与感光元件7所组成的成像系统的MTF值后,不论被测物体在激光位移传感器量程内的什么位置,best终所呈现的光斑均为长条状,且长条状的光斑在子午方向(T)上被拉长,而在弧矢(S)方向上被压缩。这样,就能够使得光斑与像元之间的接触面积增大,使得光斑更加容易地被感光元件所接收,能够更好地应对使用中因为振动或机械变形等随带来的不良影响。同时,还能够降低成像物镜的设计难度,降低成本。不仅如此,由于光斑在弧矢方向上被压缩,所以更加容易确定光斑在弧矢方向上的中心位置,有助于提高测量精度。另外,光斑在子午方向上的拉长,并不会影响测量精度。在精密测量领域中,非接触式位移技术的使用正在迅速增长。黄浦区激光位移传感器源头直供厂家

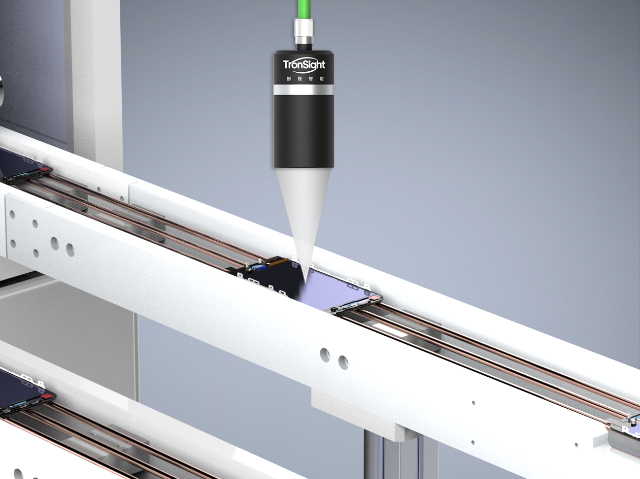
根据本发明实施例的激光位移传感器主要包括激光器(例如,可以是CN1 06855391B5激光二极管)1、聚焦透镜2、窗口玻璃3、带通滤光片5、成像物镜(也可称为接收物镜)6、感光元件7以及反光元件8。其中,该激光位移传感器用于对被测物体4进行测量。在图1所示的结构中,省略了激光位移传感器的外壳。实际上,上述窗口玻璃3可以设置在激光位移传感器的外壳上,供激光器所发出的光通过。激光位移传感器的工作过程如下:由激光二极管1发射的激光束通过聚焦透镜2聚焦、窗口玻璃3滤光后,照射在被测物体4的表面形成一个测量光斑,激光束可以垂直入射到被测物体4表面(即垂直入射),也可与被测物体4表面成一定的角度(即斜入射)。该测量光斑由成像物镜6成像,并在感光元件7形成测量信号。上饶激光位移传感器按需定制非接触式位移传感器的出现推动了现有技术的适应,以满足新的测量要求并提高测量的准确性和分辨率。
从图2的镜头图可以看出,第二块透镜的半径很小,主要是为了保证系统在整个工作范围内得到相对均匀的光斑。表1给出了在工作范围内光斑的直径大小,maximum为0.4mm,在靠近透镜的一边,minimun为0.08mm,在55mm处。由于成像系统的入射光是整形部分光经过物体散射回去的,因此整形系统得到的光斑不能太小;同时为了保证精度要求,光斑也不能太大,上面的结果能够满足需求。得到好的出射光斑以后,如何接收物体表面的散射光并使其精确成像,是确保激光位移传感器精度的关键问题。在直入射式三角法测量中,物体沿激光入射方向移动,物面并不垂直于成像光轴。那么在透镜成像过程中(如图1),由几何成像公式可证明: tanα/tanβ=d1/d',即为理想成像的Scheimpflug条件[5]。要想达到理想的成像效果,光电探测器需依此条件放置。
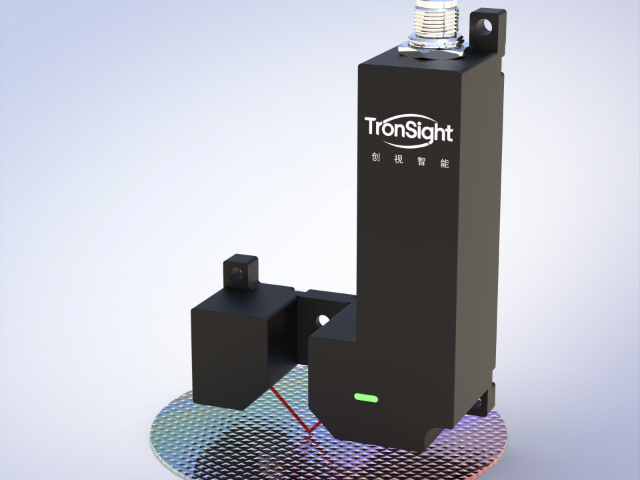
一种激光位移传感器检验校准装置,其特征在于:包括一可伸缩导轨、一微调装置、一传感器夹持装置、一激光位移传感器以及一激光红外线接收挡板;所述微调装置和传感器夹持装置设于所述可伸缩导轨的上端;所述激光位移传感器夹持在所述传感器夹持装置上,且使所述激光位移传感器的激光发射端朝向所述微调装置;所述激光红外线接收挡板与所述微调装置固接,且使所述激光红外线接收挡板的接收面朝向所述传感器夹持装置。啊啊啊啊啊啊啊它可以用于测量机械零件的位移,以确保其精确性和稳定性。

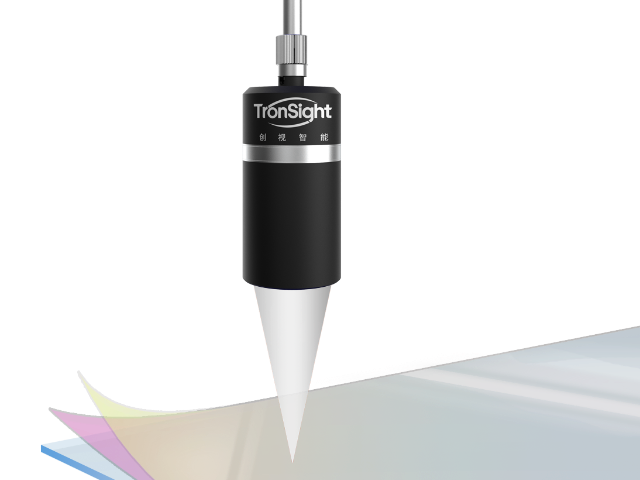
在以激光三角法为基本原理的激光位移传感器中,相对于成像物镜,物面和像面都成倾斜状态,即物面与像面都与成像物镜光轴成一定的夹角。在传统激光位移传感器中,光学系统设计都兼顾成像物镜子午方向(T方向)和弧矢方向(S方向)两个方向的成像质量。由于需要兼顾两个方向的成像质量,所以这种需求的存在会增加激光位移传感器的成像物镜设计难度,提高制造和维护成本。不仅如此,随着激光位移传感器的使用,很可能会因为振动、机械变形等原因,使得激光器发出的光斑无法准确投射到传感器上,导致系统信噪比降低,影响测量的准确性,甚至可能出现完全无法进行测量的问题。激光位移传感器可以实现微米级的位移测量。绍兴激光位移传感器24小时服务
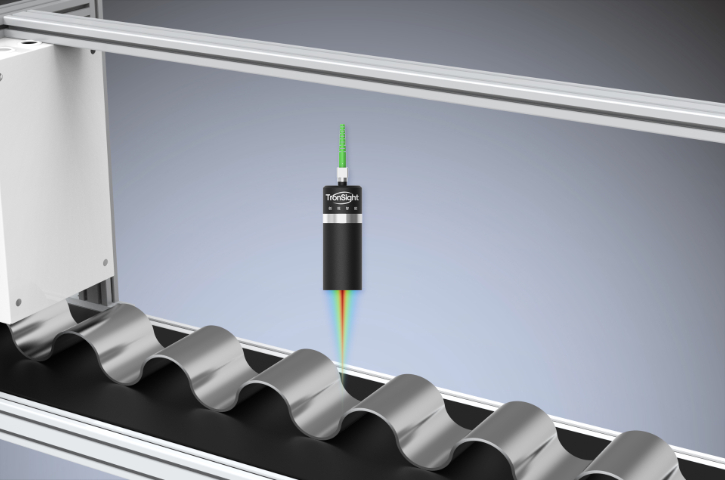
使用三角测量原理的位移传感器时,需要根据目标物的表面状态倾斜安装传感头,以确保可适当接收反射光。黄浦区激光位移传感器源头直供厂家
所述微调装置2包括一蜗轮蜗杆机构21、一电子测量仪22以及一微调平台23;所述微调平台23设于所述电动伸缩双直线导轨11上端的尾部,所述微调平台23的末端向上设有一延伸部231;所述蜗轮蜗杆机构21设于所述微调平台23的前端;所述电子测量仪22的一端抵接于所述延伸部231,另一端抵接于所述蜗轮蜗杆机构21。所述蜗轮蜗杆机构21包括一横向蜗杆211、一蜗轮(未图示)以及一位移调节把手212;所述横向蜗杆211的一端与所述激光红外线接收挡板5的背面固接,另一端与所述电子测量仪22抵接;所述位移调节把手212与所述蜗轮固接;当旋转所述位移调节把手212时通过所述蜗轮联动所述横向蜗杆211进行横向位移。黄浦区激光位移传感器源头直供厂家