运动操控设备的自我诊断功能通常是可以定期自动执行的,以下从实现方式、相关设置及优势等方面为你具体介绍:实现方式基于定时器机制:运动操控设备内部一般设有定时器,可设定特定的时间间隔,到达设定时间后,定时器会触发自我诊断程序开始运行。比如以每隔1小时、2小时等为周期,自动启动诊断流程,对设备...
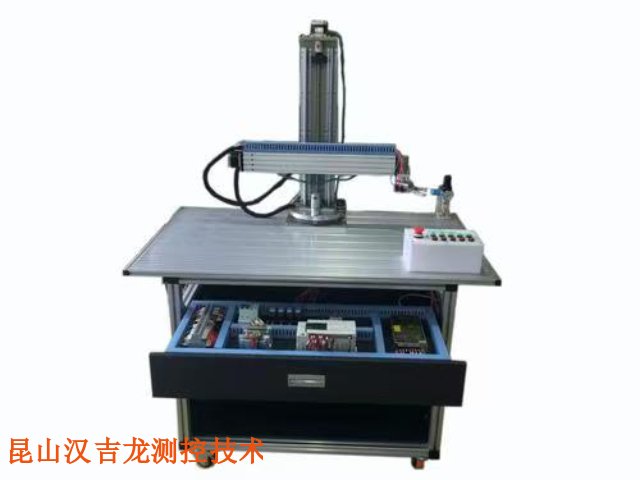
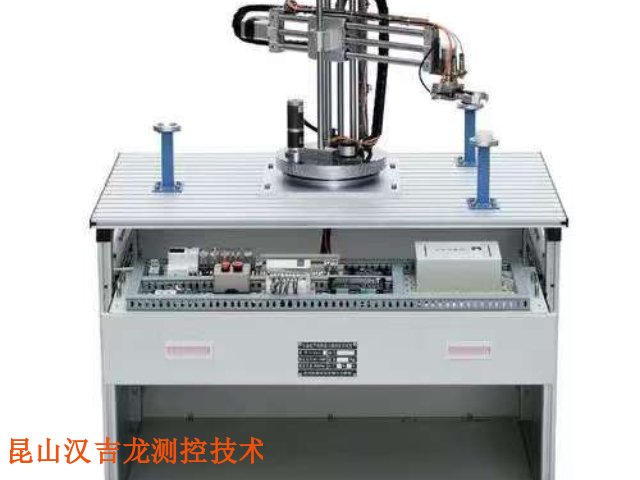
运动控制实训平台基本参数
- 品牌
- HOJOLO,LEAKSHOOTER,VALENIAN,VA
- 型号
- VT-ZP160
- 类型
- 操控实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 10
- 外形尺寸
- 1900x1000x1200
- 重量
- 10
- 产地
- 昆山
- 厂家
- 汉吉龙测控技术有限公司
运动控制实训平台企业商机
运动操控设备的自我诊断功能在检测通信故障方面虽有一定作用,但受多种因素限制,存在不少局限性,主要体现在复杂故障判断、间歇性故障捕捉、通信协议深度解析等方面,具体如下:复杂通信故障判断困难多重故障叠加:当多个通信故障同时发生或通信故障与其他类型故障(如硬件故障、软件故障)相互交织时,自我诊断功能可能难以准确分辨出具体的故障原因和位置。例如,网络通信中断可能是由于网线损坏、网络接口故障以及软件中网络配置错误等多种原因共同导致,自我诊断功能可能只能检测到通信中断这一现象,而无法明确指出具体是哪个环节出现了问题。级联故障分析:在复杂的运动网络中,通信故障可能会引发一系列的连锁反应,产生级联故障。自我诊断功能往往只能检测到直接的通信异常,对于由通信故障引发的后续间接故障,可能无法准确判断其根源是通信问题,还是其他受影响的部件或系统出现了故障。 当遇到突发停电情况,平台的数据能完整保存吗?智能化运动控制实训平台公司

自我诊断可通过检测驱动器的输出信号等方式发现。软件故障程序错误逻辑错误:检查运动操控程序中的逻辑是否存在错误,如指令执行顺序错误、条件判断错误等,可能导致设备运动异常。代码漏洞:检测程序代码中是否存在漏洞,可能引发设备在特定情况下出现死机、重启等问题。参数配置错误运动参数设置不当:如速度、加速度、位置等运动参数设置不合理,可能导致设备运动不平稳、精度下降或超出安全范围,自我诊断可对这些参数进行检查。通信参数错误:通信波特率、数据位、停止位等通信参数设置错误,会导致设备之间通信不畅,自我诊断可对此进行检测。通信故障网络连接中断:检测设备与上位机、其他设备之间的网络连接是否正常,是否出现网线松动、网络设备故障等导致的连接中断。数据传输错误:检查通信过程中是否存在数据丢失、数据错误、数据延迟等问题,这可能影响设备之间的协同工作和操控指令的准确传输。运动故障位置偏差:监测设备实际运动位置与目标位置之间的偏差是否超出允许范围,可能是由于机械传动误差、传感器误差等原因引起。速度异常:检测设备的运动速度是否与设定速度相符,是否出现速度波动过大、速度无法达到设定值等问题。 实物运动控制实训平台设备运动实训平台的运动测控功能是否能满足航空航天领域的模拟需求?

无法进行通信协议深度解析协议标准更新:随着技术的不断发展,通信协议也在不断更新和完善,新的协议版本和特性不断涌现。运动控制设备的自我诊断功能可能无法及时跟上协议的更新速度,对于一些新的协议标准和复杂的协议内容,无法进行深入的解析和检测。自定义协议兼容:在一些特定的运动控制应用场景中,可能会使用自定义的通信协议或对标准协议进行了扩展和修改。自我诊断功能可能无法很好地兼容这些自定义协议,导致无法准确检测通信过程中是否存在与协议相关的故障,如协议数据格式错误、协议参数配置不当等问题。
运动控制设备调整考虑因素设备运行环境:如果设备处于恶劣的工作环境,如高温、高湿度、强电磁干扰等,可能需要提高检测频率,以便及时发现因环境因素导致的故障。反之,在稳定的工作环境中,检测频率可以适当降低。设备重要性和使用频率:对于关键设备或使用频繁的运动控制设备,为了确保其稳定运行,可能需要较高的检测频率,以便快速发现并解决潜在问题,保障生产过程的连续性。而对于一些非关键设备或使用不频繁的设备,检测频率可以相对较低。故障风险评估:根据设备的历史故障数据和当前的运行状况,对故障发生的可能性进行评估。如果设备近期出现过一些小故障或存在老化等问题,可适当提高检测频率;如果设备一直运行稳定,则可以维持较低的检测频率。当需要切换不同的运动模式,在实训平台上的操作流程是怎样的?

自我诊断功能可能无法直接检测到这些环境因素与通信故障之间的关系。例如,湿度较大可能导致通信线路受潮,影响信号传输质量,但自我诊断功能可能只能检测到通信出现问题,而无法将其与湿度变化联系起来。对高层协议和应用层故障检测能力弱高层协议解析局限:自我诊断功能通常主要关注底层通信协议的故障检测,对于高层协议如传输操控协议(TCP)、用户数据报协议(UDP)等层面的故障,检测能力相对有限。例如,在TCP连接中出现的连接超时、重传机制异常等问题,自我诊断功能可能无法深入解析和准确判断,因为这些问题涉及到更复杂的网络通信逻辑和状态管理。应用层故障识别困难:对于应用层的通信故障,如应用程序之间的数据交互错误、业务逻辑导致的通信异常等,运动操控设备的自我诊断功能往往难以识别。因为应用层的故障通常与具体的业务应用相关,需要对应用程序的功能和数据流程有深入的理解,而自我诊断功能一般不具备这样的应用层分析能力。运动操控设备的自我诊断功能能否检测到通信故障的类型?如何克服运动操控设备自我诊断功能在检测通信故障时的局限性?针对运动操控设备的自我诊断功能的局限性。 运动实训平台运行时,如何实时监测和调整能耗?新一代运动控制实训平台现状
运动实训平台的考核方式是否能评估学生的能力?智能化运动控制实训平台公司
提高运动操控设备的运行稳定性是一个系统工程,需要从硬件、软件、环境、维护等多个方面综合考虑和优化,以下是具体措施:硬件方面选用质量部件:在设备选型和设计阶段,选择质量可靠、性能稳定的硬件部件。如选用**品牌、经过市场长期验证的电机、驱动器、操控器等**部件,确保其在长时间运行过程中能保持稳定的性能。优化电路设计:合理设计硬件电路,确保电路布局合理,减少电磁干扰和信号串扰。采用多层电路板设计,合理规划电源层和地层,为电路提供稳定的电源和良好的接地环境。进行硬件冗余设计:对于关键的硬件部件和电路,采用冗余设计。如采用双电源模块、双操控器等冗余配置,当一个部件出现故障时,另一个可以立即接管工作,保证设备的正常运行。加强散热与防护:为设备配备散热系统,如散热片、风扇等,确保设备在运行过程中能保持合适的温度。同时,对设备进行防尘、防潮、防水等防护处理,提高设备在恶劣环境下的适应能力。软件方面优化操控算法:根据运动操控设备的具体应用场景和要求,选择合适的操控算法,并对其进行优化。如采用PID操控算法、模糊操控算法等,提高设备的操控精度和响应速度,减少运行过程中的抖动和误差。 智能化运动控制实训平台公司
与运动控制实训平台相关的文章

瓦伦尼安运动控制实训平台怎么用
- VT-SJC1000运动控制实训平台工作原理 2025-03-01
- 上料运动控制实训平台内容 2025-03-01
- 分炼运动控制实训平台使用方法 2025-03-01
- 汉吉龙运动控制实训平台连接 2025-02-28
- 新一代运动控制实训平台定制 2025-02-28
- PLC运动控制实训平台调试 2025-02-27
- 工业运动控制实训平台视频 2025-02-26
- 机械运动控制实训平台服务 2025-02-26
- 智能制造运动控制实训平台厂家 2025-02-26
- 非标型运动控制实训平台 2025-02-25
- 国产运动控制实训平台操作步骤 2025-02-24
- 机械运动控制实训平台调试 2025-02-24
与运动控制实训平台相关的产品

与运动控制实训平台相关的新闻
-
维修运动控制实训平台系统 2025-02-22 21:06:20瓦伦尼安使学员掌握如何获取运动系统的状态信息,实现反馈操控。实践应用项目实践:通过实际的运动操控项目案例,如工业机器人运动操控、数控机床进给系统操控、自动化生产线输送系统操控等,让学员将所学的理论知识和操控技术应用到实际项目中,培养学员的工程实践能力和解决实际问题的能力。实验操作:配备丰富的...
-
ABB运动控制实训平台加工 2025-02-22 20:06:39hjl智能制造系统平台由数字化仿真、数字化总控、智能仓储、智能运输、智能加工、智能检测、智能装配、智能打标、RFID识别、安全防护等十部分组成。支持后期5G扩展;构造一个层级式教学、高真实度的运作环境,为学生工程实践教学提供一个先进的、创新的、密切联系工业生产实际的工程实践平台,教学与动手实践相结合...
-
工业运动控制实训平台连接 2025-02-22 02:06:07详细介绍:hojolo微型智能制造系统由工业机器人机夹具库单元、数控加工单元、增材制造单元、装配单元、立体仓储料仓系统、编程设计工作单元、智能制造信息管理较件、RFID系统、MES系统、5G云应用、数字孪生系统、配套公共设拖等十三部分组成。整机技术参数:1、供电电源:AC380V50HZ2、使用功率...
-
智能化运动控制实训平台公司 2025-02-20 12:05:53运动操控设备的自我诊断功能在检测通信故障方面虽有一定作用,但受多种因素限制,存在不少局限性,主要体现在复杂故障判断、间歇性故障捕捉、通信协议深度解析等方面,具体如下:复杂通信故障判断困难多重故障叠加:当多个通信故障同时发生或通信故障与其他类型故障(如硬件故障、软件故障)相互交织时,自我诊...
与运动控制实训平台相关的问题
新闻资讯
产品推荐
-

基础款轴心激光校正仪制造商
2026-05-24 -
无线振动激光对中仪怎么样
2026-05-24 -

耦合轴心激光校正仪使用视频
2026-05-24 -
经济型法兰联轴器对中仪现状
2026-05-24 -

瑞典轴心激光校正仪厂家排名
2026-05-24 -

自主研发角度偏差测量仪使用方法
2026-05-24 -
法国轴心激光校正仪哪家好
2026-05-24 -
马达法兰联轴器对中仪用途
2026-05-24 -

租用轴心激光校正仪工作原理
2026-05-24