- 品牌
- 煜炜光学
- 型号
- KS9700、KR1000、RCP1000、KS2200等
- 类型
- 便携式
井上井下一体化测绘是矿山企业面临的重要挑战,地表测绘方面,KS2800机载激光雷达系统可高效完成大面积地形测量、露天矿山测绘等任务。该系统具备110°大视场角,单次扫描可覆盖宽达1500米的带状区域。其点频保证了较高的点云密度,有利于捕捉地形细节。在井下环境,推荐使用KS2200或RCP1000三维激光雷达系统。这些设备体积小、重量轻,易于在狭窄巷道中操作。它们采用防爆设计,可安全应用于煤矿瓦斯区域。在数据融合方面,KProcess软件能够整合井上井下的点云数据,构建完整的矿山三维模型。这一模型可用于储量核算、开采设计、安全分析等多个环节。我们的激光雷达产品线覆盖了从单点测距仪到复杂三维系统的全系列,能够满足不同规模、不同深度的测绘需求。所有产品均采用模块化设计,便于用户根据实际情况进行灵活配置和升级。在售后服务方面,我们建立了快速响应机制,确保客户能够充分发挥设备性能。煜炜光学作为国内专业的激光雷达厂商,拥有从硬件到软件的全链条研发能力。我们的技术平台为产品的持续迭代提供了坚实基础,能够为矿山企业提供长期、稳定的技术支持。KR1000单点测距仪能够准确捕捉目标距离信息,测量频率达3000Hz,提供可靠的距离感知支持。东莞库区测绘测量激光雷达使用方法
激光雷达技术在地铁测绘测量中发挥着重要作用,这项技术利用激光脉冲测量距离和方向,快速获取高精度三维空间数据。在地铁环境中,激光雷达系统通常安装在移动平台上,如测量车辆。系统发射激光脉冲,这些脉冲遇到隧道壁、轨道、设施等物体后反射回接收器。通过计算激光往返时间,结合精确的定位和姿态信息,系统可以生成地铁环境的高分辨率点云模型。这种非接触式测量方法具有速度快、精度高、覆盖范围广等特点,特别适合地铁复杂狭小的空间。性能先进的激光雷达还能穿透灰尘、烟雾等,保证在各种环境下的测量可靠性。数据处理软件可将原始点云转化为三维模型、断面图等成果,支持地铁的规划、施工、运营维护等多个阶段。值得一提的是,我们公司自主研发的KS2900-OSC车载激光雷达系统,结合了高性能激光扫描仪、惯导、全景相机等,可实现360度扫描,测量精度达到毫米级。凭借强大的环境适应性和多平台兼容性,它已成功应用于多个地铁项目,为地铁的安全运营和智能化升级提供了可靠的数据支持。深圳燃煤电厂测绘测量激光雷达应用方案煜炜光学的测绘测量激光雷达设备凭借高精度单点距离测量能力,为立体仓库中的货架定位提供数据支撑。

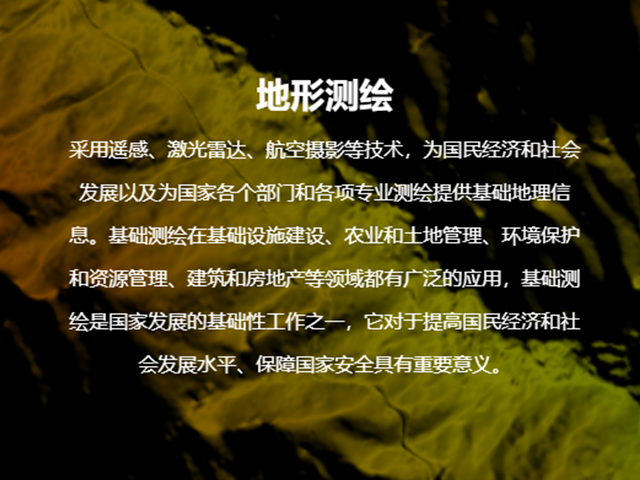
KR1000系列测绘测量激光雷达集成系统是一套专为高精度空间数据采集设计的解决方案。该系统结合了前沿的激光扫描技术、高精度定位系统和智能数据处理算法,可实现厘米级的测量精度。系统采用高性能激光雷达扫描仪,扫描频率达到100kHz,能够高效获取大范围、高密度的三维点云数据。配套的惯性测量单元(IMU)和全球卫星导航系统(GNSS)接收机,可为点云数据提供准确的位置和姿态信息。集成系统还包含高分辨率数码相机,用于采集目标区域的实景影像,实现点云数据的真彩色化。智能数据处理软件支持点云配准、滤波、分类等多种后处理功能,可直接输出DEM、DOM等成果数据。该系统适用于地形测绘、城市三维建模、文物保护等多个领域,能够有效提升测绘工作的效率和精度。作为该系统的研发者,武汉煜炜光学科技有限公司依托在激光雷达领域的技术积累,为用户提供完善的技术支持和定制化服务,助力测绘行业向数字化、智能化方向发展。
裂缝检测激光雷达系统的操作需要遵循规程,以确保测量结果的准确性和设备的稳定运行。首先,在启动系统前,操作人员应检查设备的各个部件,确保连接稳固、镜头清洁。启动后,需要进行设备预热和自校准,校准完成后根据实际检测需求设置扫描参数,包括扫描角度、分辨率和频率等。在开始正式扫描前,建议先进行一次空扫描,检查数据质量。正式检测时,应保持设备稳定,避免剧烈震动。对于大面积区域的检测,可采用多站点扫描方式,并在相邻站点间设置重叠区域,便于后期数据拼接。扫描完成后,立即进行数据备份是必要的。在数据处理阶段,要注意滤除噪点,并根据实际情况选择合适的裂缝识别算法。生成检测报告时,要记录检测条件、设备参数等信息,以便后续复核和对比分析。我们公司不仅提供激光雷达设备,还为客户提供技术培训和售后支持。我们的工程师团队具有现场经验,能够帮助客户掌握设备操作要领,并在实际应用中优化检测流程。道路改扩建项目中,我们的激光雷达设备能高效采集地形信息,为工程规划与设计提供准确数据支持。
多平台测绘测量激光雷达系统的使用方法因应用场景而异,但基本流程相通。对于车载系统,首先需要将设备安装在车顶,连接电源和数据线缆。启动系统后,通过控制软件进行参数设置,包括扫描频率、角分辨率等。行驶过程中,保持速度,避免急转弯和颠簸。对于机载系统,除了常规的飞行前检查外,还需注意激光雷达的安装角度和IMU的初始对准。起飞后按照预设航线飞行,保持飞行高度和速度。手持系统则更加灵活,适用于小范围测量。操作时需保持握持,移动,确保扫描覆盖完整。水面测量时,需考虑船只晃动对数据的影响,可采用稳定平台辅助。所有平台都需要注意同步采集GNSS数据,以便后期点云配准。数据采集完成后,进行数据备份和初步质量检查。后处理阶段,根据不同平台的特点,采用相应的软件工具进行数据滤波、配准和精度评估。在实际应用中,操作人员需要根据具体情况调整采集策略,以获得测量效果。我司开发的多平台兼容的激光雷达系统,如KS2900系列,具有良好的适应性和易用性,可满足各种环境下的测绘需求,为用户提供解决方案。KS2800机载激光雷达系统采用轻量结构,适配多旋翼无人机平台,可获取港口等大范围三维点云数据。深圳燃煤电厂测绘测量激光雷达应用方案
凭借200万点/秒的高测量频率,激光雷达可生成高密度点云,提升地物特征识别能力与测绘效率。东莞库区测绘测量激光雷达使用方法
轨道巡检测绘测量激光雷达模组是一套集成化的解决方案,主要由激光扫描单元、定位导航单元、数据处理单元和控制单元四大功能模块构成。激光扫描单元采用高频率、高精度的激光发射接收装置,可实现对轨道及周边环境的快速扫描测量。数据处理单元搭载处理器和算法,可对海量点云数据进行实时处理和分析。控制单元负责各模块间的协调和数据传输,并提供人机交互接口。这些模块紧密配合,共同完成轨道几何参数测量、轨道病害识别、限界检测等多项任务。模组采用模块化设计,各单元可根据实际需求灵活组合,适应不同场景的应用需求。在硬件配置上充分考虑了轨道环境的特殊性,采用防震、防尘、宽温设计,确保在复杂工况下稳定可靠运行。作为该领域的技术提供者,煜炜光学凭借在激光雷达领域的积累,为轨道巡检测绘提供了集成化、性能良好的硬件平台支持。东莞库区测绘测量激光雷达使用方法
武汉煜炜光学科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在湖北省等地区的仪器仪表行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**武汉煜炜光学科技供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!
多平台测绘测量激光雷达系统的使用方法因应用场景而异,但基本流程相通。对于车载系统,首先需要将设备安装在车顶,连接电源和数据线缆。启动系统后,通过控制软件进行参数设置,包括扫描频率、角分辨率等。行驶过程中,保持速度,避免急转弯和颠簸。对于机载系统,除了常规的飞行前检查外,还需注意激光雷达的安装角度和IMU的初始对准。起飞后按照预设航线飞行,保持飞行高度和速度。手持系统则更加灵活,适用于小范围测量。操作时需保持握持,移动,确保扫描覆盖完整。水面测量时,需考虑船只晃动对数据的影响,可采用稳定平台辅助。所有平台都需要注意同步采集GNSS数据,以便后期点云配准。数据采集完成后,进行数据备份和初步质量检查...
- 湖北库区测绘测量激光雷达报价 2026-02-13
- 东莞库区测绘测量激光雷达使用方法 2026-02-13
- 深圳安防监测测绘测量激光雷达生产厂家 2026-02-13
- 武汉设备防撞测绘测量激光雷达定位 2026-02-13
- 荆门测绘测量激光雷达扫描仪 2026-02-13
- 湖北燃煤电厂测绘测量激光雷达设备 2026-02-12
- 湖北堆料状态分析测绘测量激光雷达测距仪 2026-02-12
- 广东装卸货测绘测量激光雷达使用方法 2026-02-12
- 武汉安全应急测绘测量激光雷达哪个牌子好 2026-02-11
- 广州安防监测测绘测量激光雷达扫描 2026-02-11



- 广州矿山测绘测量激光雷达型号规格 2026-02-09
- 深圳国土测绘测绘测量激光雷达解决方案 2026-02-08
- 湖北轨道限界检测测绘测量激光雷达定位 2026-02-08
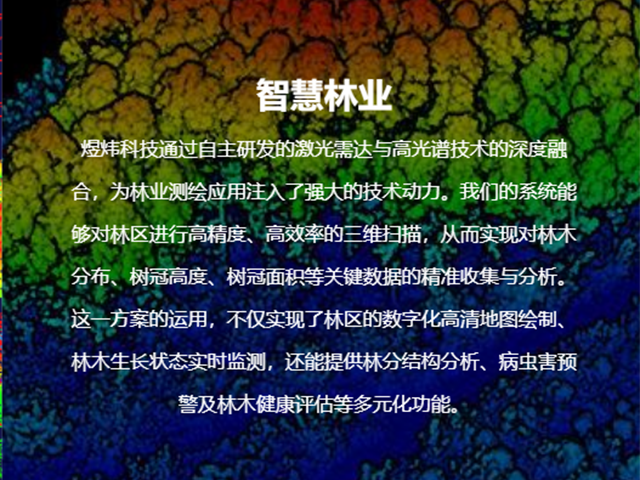
- 湖北林业调查测绘测量激光雷达系统 2026-02-08
- 深圳地铁测绘测量激光雷达型号规格 2026-02-08
- 深圳井上井下测绘测量激光雷达生产厂家 2026-02-08




- 东莞轨道巡检工业激光雷达软件 02-14
- 深圳三维工业光学传感器应用方案 02-14
- 深圳多平台激光测距仪型号规格 02-14
- 深圳智慧交通激光测距仪操作规程 02-14
- KS2800系列工业光学传感器的探测距离 02-14
- 湖北库区测绘测量激光雷达报价 02-13
- 东莞大范围工业激光雷达软件 02-13
- 广东林业勘测工业激光雷达实时监测 02-13
- 东莞库区测绘测量激光雷达使用方法 02-13
- 广州堆体工业光学传感器的探测距离 02-13