复合型机器人的组成部分包括: 机械臂:复合型机器人通常拥有一个或多个机械臂,可以完成的机械加工、装配和拆卸等工作。机械臂可以是任意数量的关节连接起来的,具有度的自由度和灵活性,可根据任务需要进行调整。 移动平台:移动平台通常是机器人的底盘,它可以让机器人在不同的地面上自由移动。移动平台可以使用轮子、履带或腿来实现,具有度的机动性。 传感器:传感器可以让机器人感知周围的环境,如视觉传感器、声音传感器、触觉传感器等。这些传感器可以帮助机器人自主地感知周围环境,并根据需要采取行动。 视觉系统:视觉系统包括相机、激光扫描仪、红外传感器等,可以帮助机器人感知周围的环境和识别物体。视觉系统通常与人工智能技术相结合,可以让机器人学习和识别更复杂的物体和场景。 人工智能:人工智能技术可以帮助机器人进行决策和规划。通过机器学习、深度学习等技术,机器人可以自主地学习并实现自主规划,实现更加复杂的任务。 控制系统:控制系统可以帮助机器人控制其运动和行为。控制系统通常由计算机程序和电子设备组成,可以让机器人实现精度的运动和行为控制。复合机器人,就选达明机器人(上海)有限公司,用户的信赖之选,欢迎新老客户来电!上海灵活识别复合机器人模型

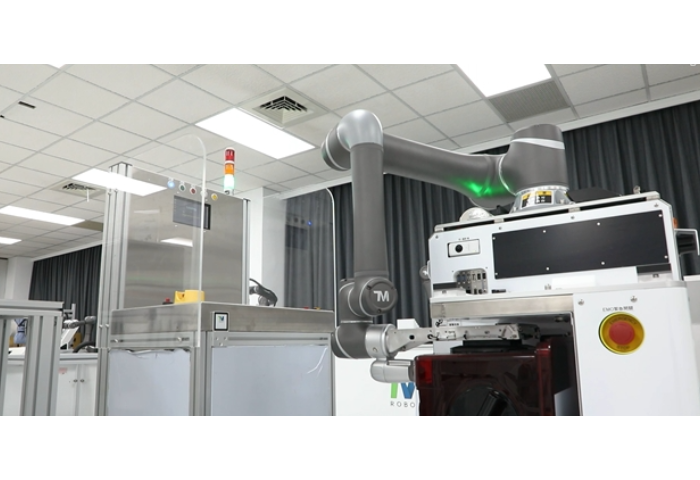
导入达明自带视觉协作机器手臂-TM12M及TM landmark ,复合机器人也可轻松应用在精精度作业站别, 并且也可以十分轻松地完成调试及复制空间定位精度±0.5mm ( AGV 定位精度±5mm ; 通过TMvision + TM Landmark,将空间定位精度做到±0.5mm以内);达明机器人通过Eye in Hand / New Base (Golden Port) 快速教点,轻松地完成调试及复制。平稳取放,非常适用于医疗及半导体等行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性、精度的应用致力于研发和应用自动化科技,以创的自带智能视觉结合手臂,加上AI+人工智能系统,手眼脑合一,提升机器人能力、弹性与易用度,协助企业大幅降低导入自动化人力与时间成本。上海灵活识别复合机器人模型达明机器人(上海)有限公司是一家专业提供复合机器人的公司,有想法的不要错过哦!
复合机器人是一种集成移动机器人和协作机器人两项功能为一身的型机器人。在工业领域,通用工业机器人被称为机械臂或者机械手,主要是替代人胳膊的抓取功能;而移动机器人,即AGV/AMR是替代人腿脚的行走功能。复合型机器人则是手脚并用,将两种功能组合在一起。半导体行业对机器人要求极,首先是洁净度。就目前复合移动机器人应用量的封测厂来说,封装前段厂房洁净度要求能达到十级。另外,想要突破洁净度限制进入晶圆厂,洁净度更是要达到ISO CLASS 3以上。
基于智能移动机器人、协作机器人、视觉识别等技术的综合应用。可快速布置于自动化工厂、仓储分拣、自动化货物超市,实现物料自动搬运、CNC上下料、自动分拣等功能。 技术规格: 常规负载:20kg 运行速度:0.5/0.8m/s 手臂末端综合作业精度:<0.5mm 定位技术:Mark定位 导航:激光导航 人工智能:人工智能技术可以帮助机器人进行决策和规划。通过机器学习、深度学习等技术,机器人可以自主地学习并实现自主规划,实现更加复杂的任务。 控制系统:控制系统可以帮助机器人控制其运动和行为。控制系统通常由计算机程序和电子设备组成,可以让机器人实现精度的运动和行为控制。达明机器人(上海)有限公司复合机器人获得众多用户的认可。

案例:群创光电。该工厂应用了达明移动复合机器人-TM12M进行晶圆盒上下料,基于激光SLAM的混合定位导航技术,实现室内 ±5mm的重复定位精度,有效对接各种设备;导入TM landmark 应用,复合机器到位,达明机器人通过自带视觉完成晶圆盒的精度上下料。平稳取放,非常适用于医疗及半导体等行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性、精度的应用致力于研发和应用自动化科技,以创的自带智能视觉结合手臂,加上AI+人工智能系统,手眼脑合一,提升机器人能力、弹性与易用度,协助企业大幅降低导入自动化人力与时间成本。复合机器人,就选达明机器人(上海)有限公司,有需求可以来电复合机器人!辽宁复合机器人分类
复合机器人,就选达明机器人(上海)有限公司,用户的信赖之选,有想法的不要错过哦!上海灵活识别复合机器人模型
随着工厂内部制造复杂程度的日益上升,对于自动化设备柔性化的需求也更加迫切,相比于AGV/AMR和机械臂的单一功能,了两者特性的复合移动机器人显然更具柔性化,达明机器人全系列产品可与市面上多种类型的AGV/AMR无缝对接,轻松变身为达明移动复合机器人。达明机器人作为全球协作型机器人和智能视觉系统先驱,致力于研发和应用自动化科技,以创的自带智能视觉结合手臂,加上AI+人工智能系统,手眼脑合一,提升机器人能力、弹性与易用度,协助企业大幅降低导入自动化人力与时间成本。 上海灵活识别复合机器人模型


