- 品牌
- 翊腾
- 型号
- AT2525.3.5.01
既然有源天线这样好,为什么并不是每个人都使用有源天线?这里有两个主要理由:1.有源天线长度一般较短并与接收机的位置相对接近和固定,所以很容易检拾比长线天线多得多的干扰(如时钟,电视等)。一旦放大,这些干扰同时也被放大了,为获得**好的接收效果,天线**好可以移动。**坏的情况下,有源天线会由于干扰的原因完全失去效能。2.**严重的问题是..互调和失真。一个设计良好的接收机在信号通路的始端,总是有良好的滤波器以确保微弱的信号不会被不需要的强信号所淹没。而有源天线的放大部分设计却并不完美。如果在放大器的输入端同时混入信号和2,在输出端会得到和频信号,差频信号和谐波信号。接收机无法将这些信号与真正的无线电信号相区别。例如,在晚上,7Mhz的信号很强,14Mhz的信号要弱一些。由于谐波失真的原因,在使用有源天线时,一些7Mhz的信号会“出现”在14Mhz的附近,这显然是个问题。同样,互调也会导致接收机收到一些虚假的信号。 翊腾电子的内置天线可以支持多种无线通信标准。外置天线内置天线研发工厂

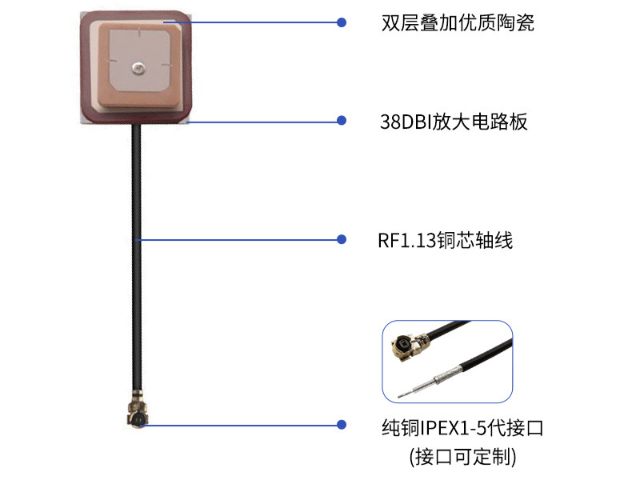
无源GPS天线:使用无源GPS天线时,由于只有一个陶瓷片接收天空的卫星信号,直接连接到模块的RF-IN脚,这种联接方式结构简单,而且标准的25*25*4的陶瓷片成本低廉技术成熟,占空体积小,适合于强调紧凑型空间GPS导航产品,蓝牙GPS,手机GPS及其他小型GPS消费类产品。
这种天线的布局是从天线的引脚直达模块的RF-IN脚,这根导线需要进行50欧阻抗匹配,而且在天线附近不能有电磁干扰,对PCB的设计及整机的EMI设计要求较高,但如果设计得优良的无源天线GPS产品同样有非常好的表现效果,而且耗电方式省。 外置天线内置天线研发工厂翊腾电子的内置天线可以提高设备的通信稳定性。

用于天线指向跟踪和控制的算法有各种类型,包括:
1.比例积分微分(PID)控制:一种经典控制算法,基于偏差、偏差积分和偏差导数来计算控制信号。
2.卡尔曼滤波器:一种状态估计算法,使用传感器测量值和过程模型来估计天线指向,即使存在噪声和干扰。
3.模糊逻辑控制:一种基于模糊**理论的控制算法,可以处理不确定性和非线性。
设计卫星通信天线系统中的指向跟踪与控制机制时,需要考虑以下因素:
1.指向精度:保持天线指向目标卫星所需的精度。
2.跟踪速率:天线响应外部扰动和卫星运动的能力。
3.环境因素:风载荷、温度变化等外部因素对指向精度的影响。
4.成本和复杂性:系统的制造、安装和维护成本。
两频率相同、振幅相近的电磁波能量流(energyfows)面对面地相撞(impinge)在一起,会产生驻波(standingwave),这种电磁波的能量粒子在空间中是处于静止(siand)状态(motionless)的,此暂停运动的时间长度比两电波能量流动的时间要长。因为驻波的能量粒子是静止不动的,所以,没有能量流进驻波或从驻波流出来。上述叙述较抽象,但是这里举个类似的例子,就可说明什么是驻波做个物理实验,将两个口径、流速都相同的水管,面对面相喷,在两水管之间将会激起一个上下飞奔的水柱,这个水柱就是驻波。如果是在无地心引力的空间中,这个水柱将静止在那里不会坠地。电磁波在传输在线流动,入射波和反射波相遇时就会产生驻波。驻波比(standingwaverate;SWR)是驻波发生时**大电压和**小电压的比值(VSWR)。 翊腾电子的内置天线可以满足各种无线通信需求。
噪声耦合可能会在天线中引起接收噪声。
天线的输出可通过RF级联来实现。
峰值电压也是天线测试中常用的指标。
天线集成可以通过天线本身的设计和外部电路来实现。
天线放大器和前置放大器可用于优化天线信号增益。
天线可以用于自适应增益控制的应用中。
天线的天线增益可以通过天线形状和材料的优化进行改善。
天线的设计需要考虑电磁兼容性和电磁气动力学。
天线的输出输入可以通过开关矩阵来实现。
天线的天线阻抗可以用来评估天线性能。 内置天线的材料可以影响天线的频率响应和带宽。3D场形图内置天线测试
翊腾电子的内置天线具有高性能和稳定的信号传输。外置天线内置天线研发工厂
内置天线的性能和效果受设备内部结构影响,需考虑布局、材料等因素来设计。合理的结构能提高天线性能和覆盖范围。
天线位置:性能影响(位置对性能有直接影响)、设计阶段(在设计时确定合理位置)、覆盖范围(确定位置需考虑覆盖范围)
内置天线需与设备电路匹配,测试和调试确保匹配性,可达比较好效果。匹配不良会影响天线性能。
电磁兼容性:设计考虑(考虑设备的电磁兼容性防止干扰和辐射问题)、影响天线(影响天线设计决策确保设备符合标准)、测试验证(需进行电磁兼容性测试验证,保证天线性能和设备无干扰问题) 外置天线内置天线研发工厂
- 苏州RF天线内置天线制造商 2024-11-05
- 定位精度内置天线工艺 2024-11-05
- 模块内置天线原理 2024-11-05
- 内置天线设计厂家 2024-11-05
- IPEX天线内置天线 2024-11-05
- 测量仪内置天线量大从优 2024-11-05
- 灵敏度内置天线介绍 2024-11-05
- hdtv内置薄膜天线 2024-11-05
- 安装内置天线多少钱 2024-11-05
- 暗室内置天线干扰 2024-11-05
- 内置天线导航 2024-11-04
- 江浙沪内置天线内置天线在哪定做 2024-11-04


