智能驾驶汽车电子测试模组需具备多传感器仿真能力,其视觉仿真模块可输出 LVDS 格式的虚拟摄像头信号,帧率达 60fps,分辨率支持 1920×1080;雷达仿真模块能生成点云数据,模拟不同距离、速度的目标物;激光雷达仿真则可提供百万点级的 3D 点云,模拟雨、雾等天气对传感器的影响。传感器数据同步精度控制在 1ms 以内,确保多传感器融合算法的测试有效性。通过与场景引擎(如 Prescan)对接,模组可复现海量真实交通场景,从各方面验证自动驾驶系统的感知与决策能力。汽车电子测试转接头的材质兼容性,需与汽车电子接口金属成分匹配防腐蚀。佛山安全汽车电子测试连接
自动化测试序列是汽车电子测试模组的核心竞争力,通过脚本化编程实现测试流程的无人值守。主流模组支持 CAPL、Python 等脚本语言,测试工程师可定义信号激励、判定条件与报告生成规则,形成标准化测试用例。模块化的测试序列设计允许复用成熟测试模块,如 CAN 总线通信测试、PWM 信号解析等,新测试项目的开发效率提升 40% 以上。智能执行引擎能根据测试结果动态调整后续步骤,例如当检测到异常信号时自动触发故障诊断流程,收集关键节点数据,大幅缩短问题定位时间。广东可靠汽车电子测试工具汽车电子测试转接头的信号延迟需极低,满足汽车电子实时控制系统测试。
汽车电子测试模组的诊断功能支持 ISO 14229(UDS)协议,可执行故障码读取、冻结帧数据采集等诊断服务。模组内置诊断数据库(ODX 格式),支持主流车企的自定义诊断服务,无需手动编写诊断指令。诊断测试序列能模拟 ECU 在不同故障状态下的诊断响应,验证诊断逻辑的完整性与准确性。在产线末端测试中,模组可快速执行全系统诊断扫描,生成合规的诊断报告,确保出厂车辆的电子系统符合法规要求。诊断数据的加密传输功能则满足现代汽车电子的信息安全需求。
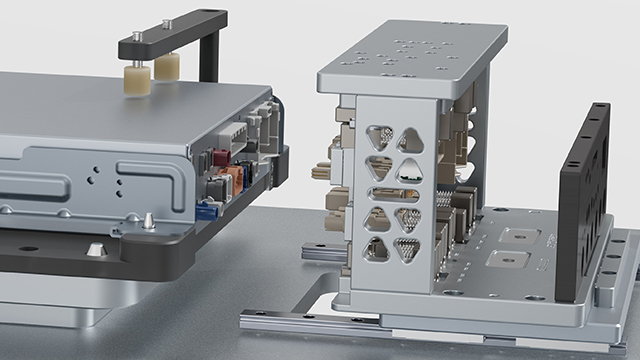
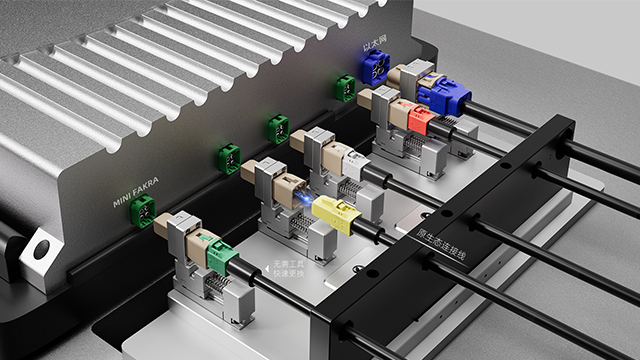
汽车电子测试模组的通信接口兼容性直接决定其应用范围,高级产品通常集成 CAN FD、LIN、Ethernet 等多种车载总线接口。CAN FD 接口支持 8Mbps 高速传输,可验证自动驾驶域控制器的实时通信性能;车载以太网接口符合 IEEE 802.3bw 标准,满足 100BASE-T1 的测试需求;LIN 接口则用于车身控制模块等低速网络的验证。接口转换模块实现不同总线协议间的透明转发,支持跨网络测试场景,如验证 CAN 与 Ethernet 之间的网关转发性能。这种多接口设计使模组能覆盖从传统汽车到智能网联汽车的全谱系电子系统测试。屏蔽层设计的汽车电子测试转接头,有效抗干扰,确保汽车电子信号纯净。
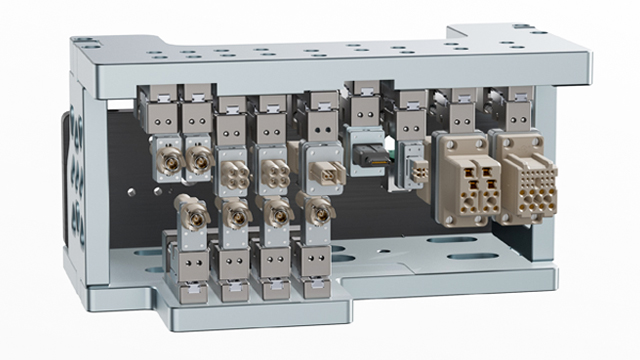
汽车电子测试模组的多通道同步采集能力满足复杂系统的测试需求,高级产品可提供 128 路模拟量输入、64 路数字量输入 / 输出通道,所有通道的同步误差小于 100ns。在动力总成测试中,可同步采集发动机转速、扭矩、水温、油压等多路信号,分析参数间的关联性;在底盘测试中,能同时记录四个车轮的转速、制动压力、转向角等数据,验证 ABS/ESC 系统的控制逻辑。高速数据记录模块的存储速率达 100MB/s,可连续记录数小时的测试数据,为后期的详细分析提供原始素材。汽车电子测试转接头的信号完整性分析,是优化汽车电子测试方案的关键。东莞智能汽车电子测试模组
高压汽车电子测试转接头,专为新能源汽车电子高压系统测试设计,安全可靠。佛山安全汽车电子测试连接
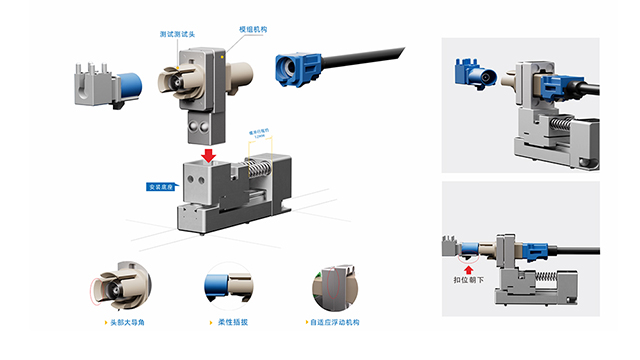
电磁兼容性(EMC)是汽车电子测试转接头的关键性能指标之一。为避免转接头成为电磁干扰的耦合路径,高级产品采用多层屏蔽设计:内层为镀镍铜网屏蔽层,覆盖率达 95% 以上;外层采用铝合金外壳,形成法拉第笼结构。这种设计可将电磁辐射衰减量控制在 80dB 以上,有效抑制外界干扰对汽车电子微弱信号(如传感器输出的 mV 级信号)的影响。在新能源汽车无线充电系统测试中,专门的转接头还需具备抗磁场干扰能力,通过磁屏蔽材料阻断交变磁场对测试信号的干扰,确保车载充电控制模块(OBC)的测试精度。佛山安全汽车电子测试连接