- 品牌
- 佳控科技
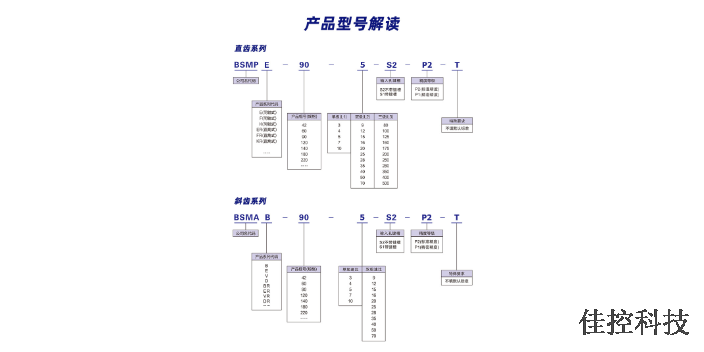
- 型号
- --
- 类型
- 齿轮-蜗杆减速器,蜗杆减速器,摆线减速器,摆线针轮减速器,行星齿轮减速器,圆柱齿轮减速器,无级减速器,谐波减速器
- 载荷状态
- 均匀载荷,强冲击载荷
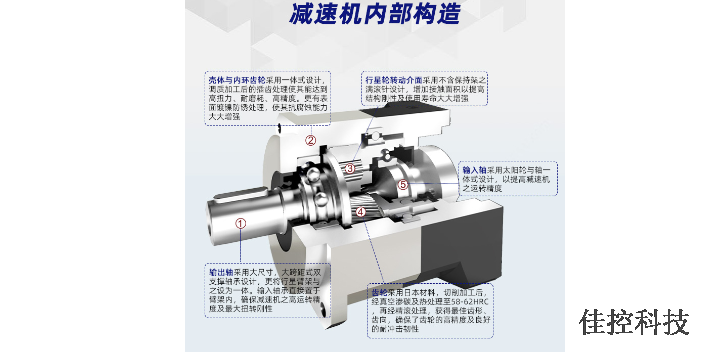
精密行星减速机主要由太阳轮、行星轮、内齿圈和行星架等部件构成。太阳轮位于中心位置,它与输入轴相连,动力由此输入。行星轮围绕太阳轮公转的同时进行自转,通常有多个行星轮均匀分布,这种设计使得受力更加均匀。内齿圈是固定的环形齿轮,与行星轮相互啮合。行星架则用于支撑行星轮,并输出减速后的动力。这种独特的结构赋予了行星减速机许多优点,比如在相同的空间内可以实现更大的传动比。与其他类型的减速机相比,它的结构紧凑,能够高效地传递扭矩,并且由于多个行星轮分担负载,具有较高的承载能力,广泛应用于对精度和可靠性要求较高的自动化设备、机器人等领域。齿轮减速电机一般是通过把电动机、内燃机或其他高速运转的动力通过齿轮减速电机的输入轴上的齿数少的齿轮。精密型减速机哪里好
精密行星减速机的工作原理基于齿轮传动。当动力从输入轴传递到太阳轮时,太阳轮开始转动。太阳轮的旋转带动与其啮合的行星轮转动,行星轮在自转的同时围绕太阳轮公转。由于行星轮与内齿圈也相互啮合,内齿圈固定不动,行星轮的公转运动通过行星架输出。通过合理设计太阳轮、行星轮和内齿圈的齿数比,可以实现不同的减速比。例如,若太阳轮有 10 个齿,行星轮有 20 个齿,内齿圈有 50 个齿,根据行星减速机的传动比计算公式,可以得出相应的减速比。这种齿轮传动方式使得动力在传递过程中能够精确地减速,并且能够保证较高的传动效率,减少能量损失,为需要精确速度和扭矩控制的设备提供了可靠的动力传输解决方案。奉贤区齿轮减速机排行榜尽量选用接近理想减速比: 减速比=伺服马达转速/减速机出力轴转速。
伺服电机减速机错位是指什么?电机减速机错位即是失步,失步分为丢步和越步。步进电动机正常工作时,每接收一个控制脉冲就移动一个步距角,即前进一步。若连续地输入控制脉冲,电动机就相应地连续转动。丢步时,转子前进的步数小于脉冲数;越步时,转子前进的步数多于脉冲数。一次丢步和越步的步距数等于运行拍数的整数倍。丢步严重时,将使转子停留在一个位置上或围绕一个位置振动,越步严重时,拖动结构将发生过冲。关于步进电机减速机丢步和失步的分析:步进电机减速机选型不当,电机力矩不够或者物体运动的惯量超过电机自锁力,造成的丢步或失步。驱动器选型不当,配套的驱动器电流偏小,影响电机正常运转,现在市面上很多电流虚标的驱动器,拿峰值电流当额定电流来忽悠消费者,驱动器选型额定电流应大于步进电机减速机额定电流的1.2-1.5倍。配套电源选型不当,配套电源应是驱动器额定电源的1.5-2倍,电源虚标比驱动器虚标更严重。控制部分应排除干扰,远离变频器,防静电。
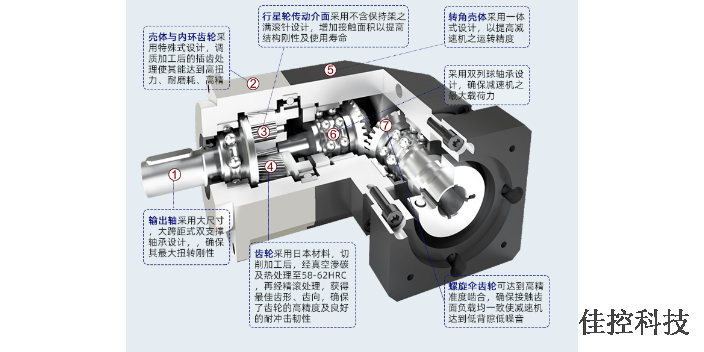
这里包括了两种,一种角传动精度,这是减速机手册里都会标出来的,这影响的是机器人的定位精度;另一种是重复定位精度,这是减速机手册里没有,这影响的是机器人的重复定位精度。角传动精度一般减速机厂家都有专业的设备,但是客户自己也可以设计一些简易的方法去测。重复定位精度也一样。对于新减速机来说,要达到标称的1弧分以下,很多厂家是OK的,但是比较大的问题是一致性和稳定的。可能大部分厂家一开始精度都达标,但几个月后,要么精度跳上跳下,要么直接是越来越差;重复定位精度也如此,短时间内达到较高重复定位精度是没什么问题,但是时间长了,如何保持住就很难了!蜗轮减速机为了提高效率,一般均采用有色金属做蜗轮,蜗杆则采用较硬的钢材,由于它是滑动磨擦传动。

在医疗设备领域,精密行星减速机发挥着关键作用。以医用 CT 扫描仪为例,行星减速机用于控制扫描床的移动和旋转部件的转动。扫描床的精确移动对于准确扫描患者身体不同部位至关重要,行星减速机能够将电机的动力精确地转化为合适的移动速度和位置控制。在旋转部件中,如扫描架的旋转,行星减速机保证了旋转的平稳性和精度,使得扫描图像更加清晰准确。在手术机器人中,行星减速机也是不可或缺的。它控制着手术机械臂的关节运动,医生通过操作控制台发出指令,行星减速机驱动机械臂精确地完成手术器械的定位和操作,为手术的精细性和安全性提供了有力保障,减少了患者的痛苦和手术风险。既有箱体底脚又有安装法兰的产品在安装中严防互相较劲。闵行区减速机哪个好
工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000Nm以上。精密型减速机哪里好
随着科技的发展,精密行星减速机朝着高精度化方向发展。在现代工业生产和**装备制造中,对角度、位置和速度的控制精度要求越来越高。为了满足这些需求,行星减速机制造商通过不断改进设计和制造工艺来提高精度。在设计方面,利用先进的计算机辅助设计软件,对齿轮的参数进行更精确的优化,进一步减小回程间隙和提高定位精度。在制造工艺上,采用超精密加工技术,如纳米级别的磨齿工艺,使齿轮的齿形精度和表面光洁度达到更高水平。高精度化的发展趋势使得行星减速机在半导体制造、光学仪器等对精度要求苛刻的领域有更广泛的应用。精密型减速机哪里好
- 长宁区现代化减速机供应 2024-12-19
- 减速机大概多少钱 2024-12-19
- 精密型减速机哪里好 2024-12-19
- 奉贤区现代化减速机供应商 2024-12-18
- 宝山区K系列螺旋锥齿轮减速机产品介绍 2024-12-18
- 青浦区齿轮减速机产品介绍 2024-12-18
- 黄浦区硬齿面减速机现价 2024-12-18
- 崇明区高精密减速机品牌 2024-12-18
- 青浦区转角高精密减速机哪个好 2024-12-16
- 虹口区转角高精密减速机排行榜 2024-12-16
- 上海高精密减速机大概多少钱 2024-12-16
- 长宁区专业减速机排行榜 2024-12-16