在自动化设备、机械臂、3D打印等领域,KK模组和直线模组都是常见的线性运动解决方案,但它们的结构、性能和应用场景却有很大不同。苏州尚恩格就带您详细对比一下这两者的区别,帮助你做出更合适的选择!什么是直线模组?直线模组是一个更大范围的概念,泛指所有能实现直线运动的模组,包括丝杠模组、皮带模组、齿轮齿条模组,以及高性能的直线电机模组。(1)传统直线模组(丝杠/皮带驱动)这类模组和KK模组类似,但通常结构更稳固、负载能力更强,适用于工业自动化、机床、物流分拣等场景。(2)直线电机模组(选择)直线电机模组采用无接触电磁驱动,直接利用电磁力推动负载运动,没有机械传动部件(如丝杠、皮带),因此具备超高速度、超高精度和长寿命。直线模组的所有动作,如直线、旋转等,都可以在现场进行设定,并设定在误差范围内。盐城KK模组厂家
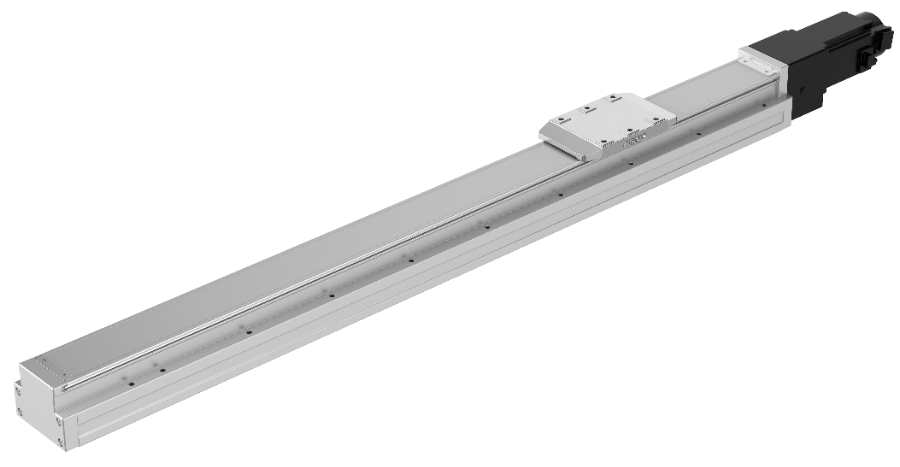
同步带型直线模组主要是由皮带、直线导轨、铝合金型材、滑动座、联轴器、马达、光电开关等组成。同步带是一种应用较为大范围的环形带,在工业机械设备传动中起到很好的传动作用,可以进行加工从而满足不同行业和场合的应用。现在市面上常用的同步带也大致分为两种:一类是橡胶同步带有圆弧齿和梯形齿,是指氯丁橡胶加纤维绳同步带,这种同步带的伸长率小、耐腐蚀、使用寿命长,另一类是PU同步带,这种同步带是指聚氨酯加钢丝同步带,钢丝的种类比较多,包括镀锌钢丝、镀铜钢丝等,分为单面齿带和双面齿带,单面齿主要用来单轴专项,双面齿带主要用来反向传动或多轴传动。同步带型直线模组可以将皮带固定在滑动座上,运行后皮带带动滑动座进行稳定的往返直线运动。并且因为同步带导程普遍都挺大,所以同步带直线模组运行后可以做到声音较小的高速运动,有效行程也偏长。绍兴皮带模组生产厂家轴向对中度:如果直线模组需要与其他组件或设备进行配合,轴向对中度的标准通常在0.05mm以内。
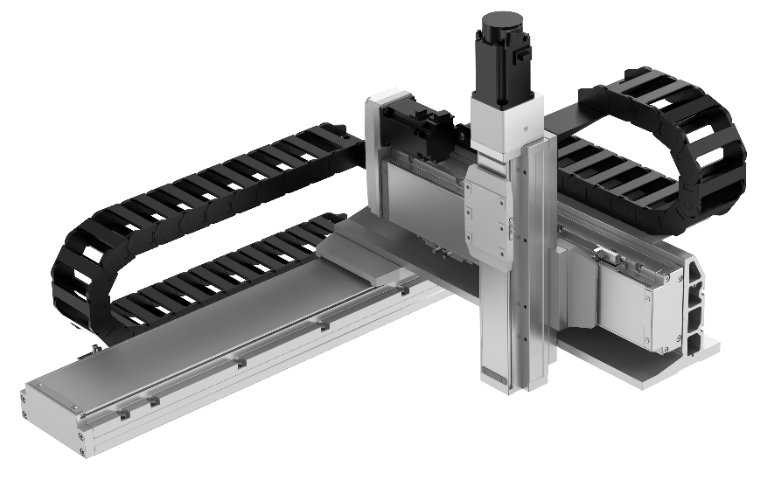
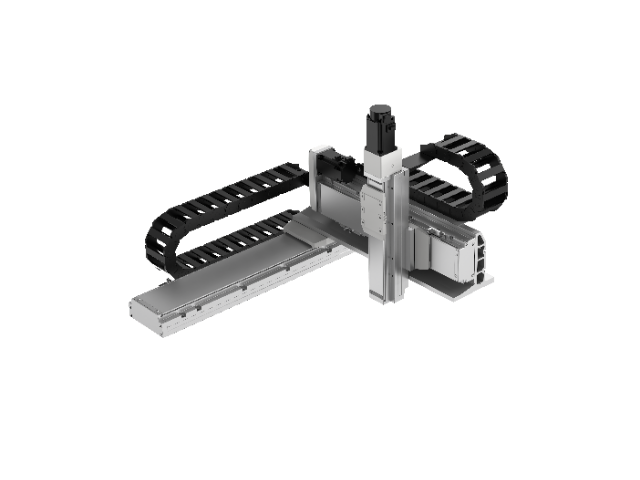
直线模组的安装与调试:确保设备高效运行的步骤直线模组作为自动化设备的关键部件,其安装与调试的规范性直接决定了设备的整体性能和生产效率。本文将深入解析直线模组的结构、安装、调试流程及常见问题解决方案,助力制造企业实现设备的高效与稳定运行。直线模组是现代自动化装备不可或缺的重要部件,应用于数控机床、机器人、自动化生产线等场景。其主要优势在于高精度、高速度和高刚性,能够满足制造业对运动精度与效率的双重需求。直线模组的基本结构包括导轨、滑块、驱动装置以及控制系统。导轨为模组提供精细的直线运动路径,滑块则与导轨配合实现平稳移动。驱动装置(如电机、丝杠或皮带)负责动力传递,而控制系统则用于调节运动轨迹和速度,确保整个系统协同高效运行。
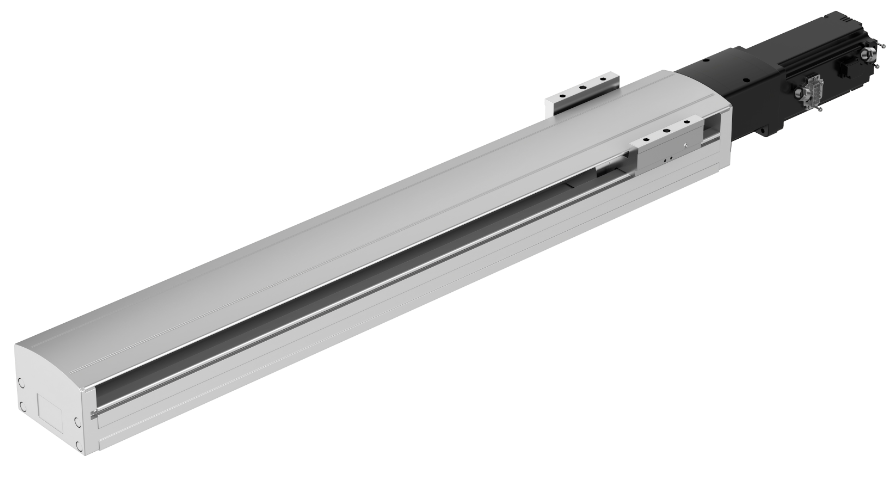
直线电机如何计算选型①.负载质量(m):50kg②.运行速度(v):0.4m/s(这个速度属于中等偏低)③.定位精度(δ):0.05mm(即±0.05mm,这个精度要求属于中等偏上)④.安装方式:水平安装初步传动方式判断:根据精度(0.05mm)和速度(0.4m/s)要求,滚珠丝杠驱动模组和精密同步带驱动模组都在考虑范围内。滚珠丝杠:更容易稳定实现0.05mm的精度,刚性好,适合50kg的负载。速度0.4m/s对丝杠来说完全可行。同步带:可以达到0.4m/s的速度,但若要稳定保证0.05mm的精度,需要选择高规格的同步带和消隙结构,成本可能接近甚至超过丝杠方案。结论:优先选择滚珠丝杠模组,因为它能更可靠、稳定地满足您的精度和负载要求。直线模组的安装精度标准通常取决于具体的应用和所需的精度水平。
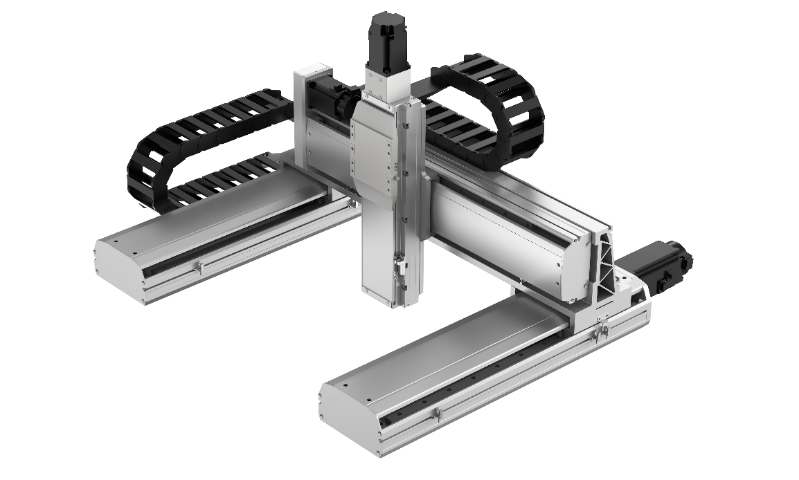
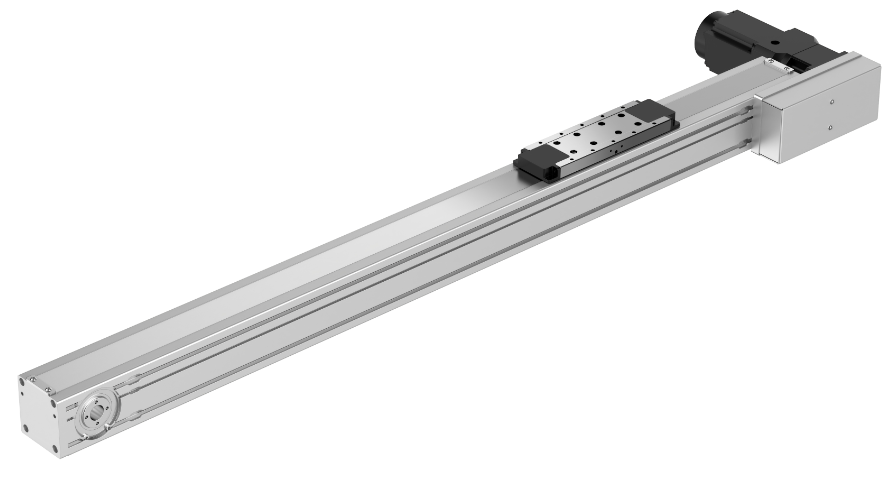
直线模组的优势是什么?其次,直线模组的结构紧凑,安装方便。与传统的传动系统相比,直线模组将多个功能集成在一个模块中,减少了零部件的数量。这种设计不仅节省了空间,还简化了安装和维护的过程。对于空间有限的生产环境,直线模组的紧凑设计无疑是一个重要的优势。此外,直线模组的标准化程度高,用户可以根据自己的需求选择不同的规格和配置,极大地提高了系统的灵活性。再者,直线模组的运动平稳性好。由于采用了高精度的导轨和滚珠丝杠,直线模组在运行过程中能够保持平稳的运动状态,减少了振动和噪音。这种平稳性不仅提高了设备的使用寿命,还能在一些对噪音要求严格的环境中,如医疗设备和实验室,提供更好的使用体验。滚珠丝杆型直线模组主要组成由: 滚珠丝杆、直线导轨、铝合金型材、滚珠丝杆支撑座、联轴器、马达、等。台州皮带模组联系方式
直线运动模组(又称直线模组或线性模组)作为智能制造的传动部件。盐城KK模组厂家
直线模组定位不准调整技巧首先排查机械结构连接问题。检查模组的滚珠丝杠与电机联轴器是否松动,若存在间隙,需松开联轴器固定螺丝,重新对齐丝杠轴与电机轴(同轴度误差≤0.02mm),再按规定力矩(通常15-20N・m)紧固;查看滑块与工作台的连接螺丝是否拧紧,用扭矩扳手逐颗检查,确保无松动,避免因连接虚位导致定位偏差。其次校准脉冲参数与补偿设置。进入数控系统参数界面,核对电子齿轮比是否与模组导程、电机步距角匹配(计算公式:电子齿轮比=(导程×1000)/(电机步距角×减速比)),若参数错误需重新设定;针对定位累积误差,可通过系统的“定位补偿”功能,在特定位置设置补偿值(如在500mm处偏差0.02mm,补偿+0.02mm),多次测试后将误差控制在0.01mm以内。盐城KK模组厂家
苏州尚恩格科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在江苏省等地区的电工电气中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来苏州尚恩格科技公司供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!