直线滑台模组选型需要注意的地方4.导向精度以及模组和支撑件的热变形等,导向精度是指运动构件沿导轨运动时其运动轨迹的准确水平。影响导向精度的主要因素有导轨承导面的几何精度、导轨和支撑件的接触精度、外表粗糙度、导轨和支撑件的刚度、导轨副的油膜厚度及油膜刚度。5.运动平稳性模组是指导轨在低速运动或微量移动时不出现爬行现象的性能。单轴手臂平稳性与导轨的结构、导轨副材料的匹配、润滑状况、润滑剂性质及导轨运动之传动系统的刚度等因素有关。选取直线滑台模组的时候首先确定的是手动调理还是电机节制,然后顺次确定位移行程,负载大小,位移精度,分辨率,外形尺寸。直交机械手由于可以进行电路细分,分辨率可以到达超微米级,还可以经过核算机节制,到达自动化目标。直线模组的安装精度标准通常取决于具体的应用和所需的精度水平。池州KK模组厂家
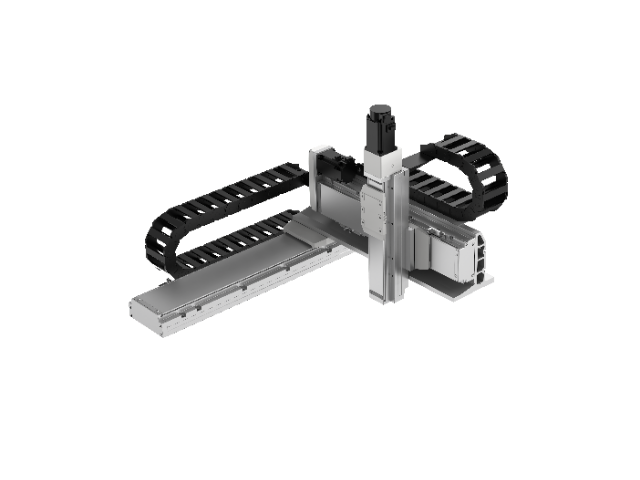
在自动化设备、机械臂、3D打印等领域,KK模组和直线模组都是常见的线性运动解决方案,但它们的结构、性能和应用场景却有很大不同。苏州尚恩格就带您详细对比一下这两者的区别,帮助你做出更合适的选择!什么是KK模组?KK模组是一种基于滚珠丝杠或皮带传动的线性模组,通常由铝合金型材、导轨、滑块和驱动部件(如步进电机或伺服电机)组成。它的特点是结构紧凑、成本较低,适用于中小型设备的精密传动需求。主要特点:采用滚珠丝杠或同步带驱动,精度较高(丝杠版精度优于皮带版)。负载能力适中,适合轻至中等负载应用。安装灵活,可组合成XYZ多轴系统,常用于3D打印机、小型CNC、自动化检测设备等。舟山丝杆模组厂家平面度:如果直线模组需要安装在一个平面上,那么该平面的平面度应该在0.02mm/m以内。
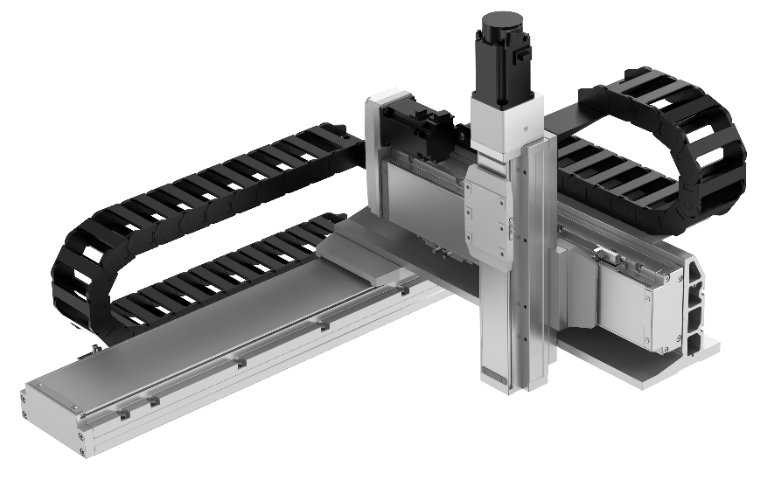
误区四:刚性匹配忽视动态响应某锂电池叠片机因模组刚性不足产生0.12mm振幅,导致极片对齐失败。选型时需计算系统固有频率:当驱动频率接近模组固有频率的80%时,必须更换更高刚性的型号。建议采用k=3EI/L³公式校核,确保系统刚度值≥50N/μm。多轴联动场景更需整体考量。机器人第七轴案例表明,当X轴模组刚性比Y轴高30%时,会产生17%的轨迹偏差。应通过有限元分析验证多轴刚度匹配,必要时采用加强筋结构或改变支撑跨距。误区五:忽视全生命周期成本某光伏串焊机选型时比较采购成本,未计算维护费用。进口模组5年总成本达28万,而国产模组虽然贵5万采购价,但润滑周期延长3倍,总成本反低9万。建议建立TCO模型,将能耗、保养、备件损耗纳入计算。模块化设计可降低隐性成本。某汽车厂通过选用可快速更换的导轨模组,使产线改造时间从72小时缩短至8小时。选型时应优先考虑具备快拆结构、标准化接口的产品。
给大家讲解一下如何实现直线滑台模组的防锈。1、每次使用后,尽可能多地擦拭防锈油。虽然工件是在出厂前具有防锈处理,及擦拭了防锈油,但蒸发和摩擦会使防锈油失去其功效,因此每次使用后的维护尤为重要。2、由于它是一个精确度要求很高的原件,直线滑台模组在存储方面有很多要求。首先,必须有一个统一的架子,需要保持在温暖干燥的环境中。当他需要把它和其他物品放在一起时,他必须注意把灰尘或腐蚀性物品放在离他较远的地方。由于防锈油在地下蒸发快,地面相对潮湿,直线导轨不准存放在地下。以上两点实现,直线滑台模组锈蚀问题将少得多。然而,只有防锈是不够的。为了确保直线滑台模组具有更长的寿命和更长的精度,还需要对操作进行标准化。未来,高精度、智能化、轻量化将成为技术主旋律,而国产企业有望在政策支持和技术积累下进一步突破国际。
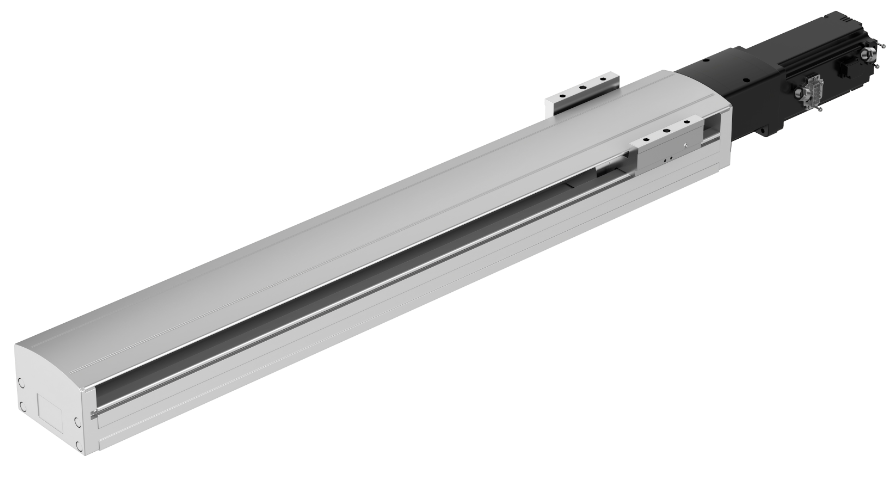
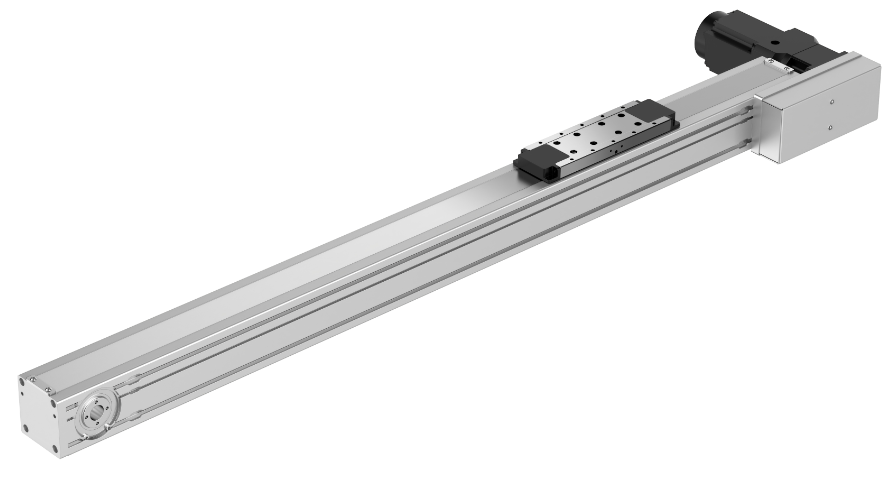
直线电机如何计算选型①.负载质量(m):50kg②.运行速度(v):0.4m/s(这个速度属于中等偏低)③.定位精度(δ):0.05mm(即±0.05mm,这个精度要求属于中等偏上)④.安装方式:水平安装初步传动方式判断:根据精度(0.05mm)和速度(0.4m/s)要求,滚珠丝杠驱动模组和精密同步带驱动模组都在考虑范围内。滚珠丝杠:更容易稳定实现0.05mm的精度,刚性好,适合50kg的负载。速度0.4m/s对丝杠来说完全可行。同步带:可以达到0.4m/s的速度,但若要稳定保证0.05mm的精度,需要选择高规格的同步带和消隙结构,成本可能接近甚至超过丝杠方案。结论:优先选择滚珠丝杠模组,因为它能更可靠、稳定地满足您的精度和负载要求。适用场景:高精度、重负载但对速度要求不高的场合,如精密测量、CNC加工等。阜阳模组联系方式
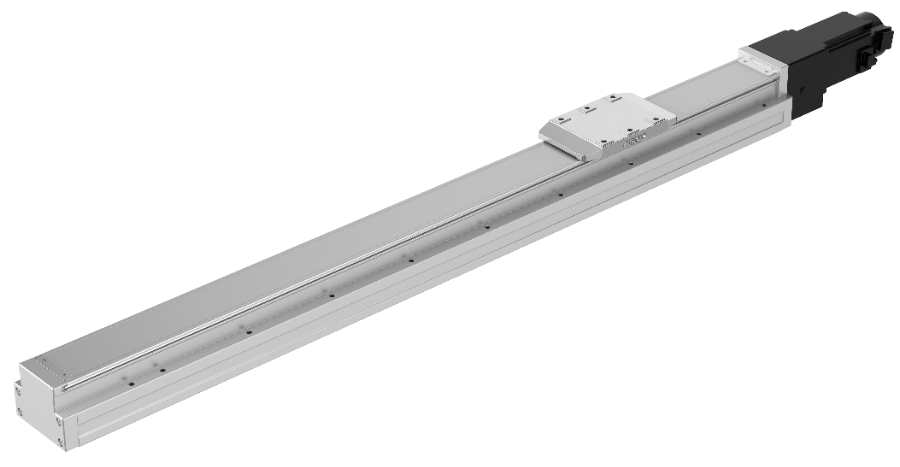
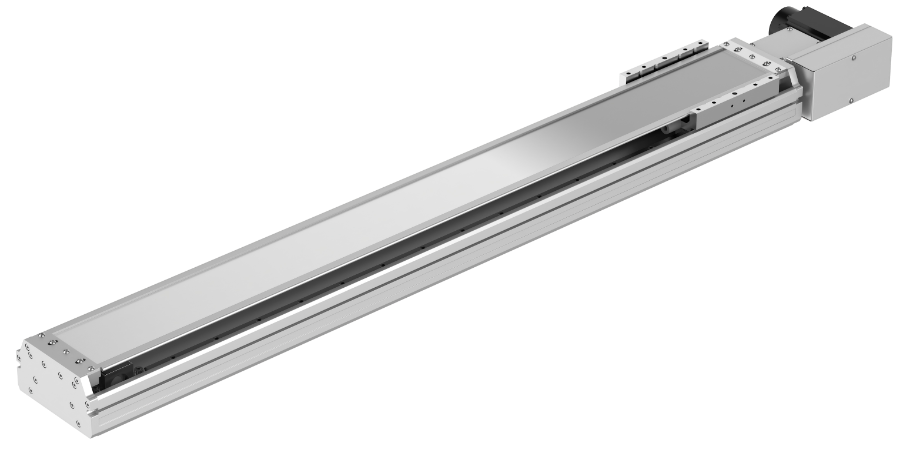
适用场景:对速度要求高、行程较长,但精度要求中等的场合,如物料搬运、激光打标、包装等。池州KK模组厂家
直线模组定位不准调整技巧首先排查机械结构连接问题。检查模组的滚珠丝杠与电机联轴器是否松动,若存在间隙,需松开联轴器固定螺丝,重新对齐丝杠轴与电机轴(同轴度误差≤0.02mm),再按规定力矩(通常15-20N・m)紧固;查看滑块与工作台的连接螺丝是否拧紧,用扭矩扳手逐颗检查,确保无松动,避免因连接虚位导致定位偏差。其次校准脉冲参数与补偿设置。进入数控系统参数界面,核对电子齿轮比是否与模组导程、电机步距角匹配(计算公式:电子齿轮比=(导程×1000)/(电机步距角×减速比)),若参数错误需重新设定;针对定位累积误差,可通过系统的“定位补偿”功能,在特定位置设置补偿值(如在500mm处偏差0.02mm,补偿+0.02mm),多次测试后将误差控制在0.01mm以内。池州KK模组厂家
苏州尚恩格科技有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在江苏省等地区的电工电气中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,苏州尚恩格科技公司供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!