
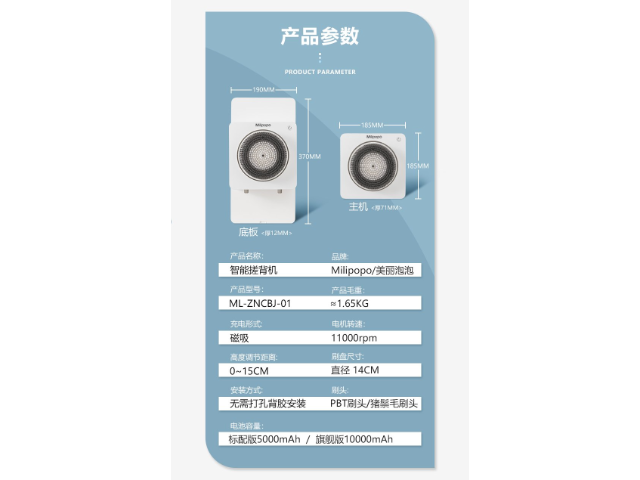
- 品牌
- Milipopo
- 型号
- 01
智能搓背机配备了先进的传感器技术和智能控制系统,能够自动感知人体的接触状态、位置信息以及背部的压力分布等情况,并根据这些数据实时调整搓背的力度、速度和角度。例如,一些**智能搓背机可以通过内置的摄像头或红外扫描装置对人体背部进行三维建模,从而更精细地规划搓洗路径,确保每个角落都能得到充分清洁。同时,它还支持多种预设清洁模式,如日常清洁、深度去污、舒缓按摩等,用户可以根据自己的需求轻松切换,享受定制化的搓背体验。电动搓背机有助于改善肌肤的整体健康状况。多功能搓背机
搓背机
在全球倡导可持续发展的大背景下,洗澡搓背机的设计与制造也将更加注重环保节能。一方面,选用可再生、无污染的新型材料替代传统的塑料和其他有害化学物质,从源头上减少对环境的负面影响;另一方面,优化产品的能源管理系统,提高电机效率,降低能耗。例如,采用太阳能充电技术为电池供电,或者开发新型的水力发电装置,利用水流的动力转化为电能,实现自给自足式的绿色能源供应。此外,产品的包装也将趋向于简约化、可降解化,进一步贯彻环保理念。浙江国内搓背机厂家报价配备可调节力度档位(3-5档),满足不同肤质需求,敏感肌亦可温和使用。
进入21世纪,尤其是近年来,随着电子技术、传感器技术、材料科学等领域的飞速发展,洗澡搓背机迎来了快速发展的黄金时期。现代洗澡搓背机在外观设计上更加注重人体工程学,采用品质的材料,使其不仅实用,而且美观大方,能够与各种浴室装修风格相融合。在功能方面,更是集成了多种先进技术,如智能感应系统、可调节的压力和速度控制、多种搓洗模式选择等,极大地提升了用户体验。同时,制造商们也在不断优化产品的性能,降低噪音、提高能源利用效率,使洗澡搓背机逐渐成为家庭和公共场所沐浴设施中的热门选择。
洗澡搓背机的重心工作原理基于电机驱动和机械传动系统,结合先进的传感器技术和智能控制系统,实现对背部等身体部位的自动搓洗。首先,电机作为动力源,通常采用高性能的直流电机或交流电机。电机启动后,通过传动装置将动力传递给搓洗机构。常见的传动方式有齿轮传动、皮带传动或链条传动等,这些传动方式能够将电机的高速旋转运动转换为适合搓洗的低速、高扭矩运动。搓洗机构是直接与人体接触并进行搓洗动作的部分,一般由搓洗臂和搓洗头组成。搓洗臂通常采用柔性或刚性的材料制成,能够根据人体背部的曲线进行自适应调整,以确保搓洗过程中与皮肤紧密贴合但不造成过度压迫。搓洗头则安装在搓洗臂的末端,其表面材质多为柔软且具有良好摩擦力的硅胶或其他亲肤材料,内部可能配备有振动电机或旋转刷头,进一步增强搓洗效果。在工作过程中,搓洗头会在电机的带动下,按照预设的运动轨迹(如上下移动、左右摆动或旋转等)对人体背部进行反复搓洗,从而去除污垢、角质层等杂质。左右搓背采用曲柄滑块机构,力度均匀避免皮肤过度摩擦。
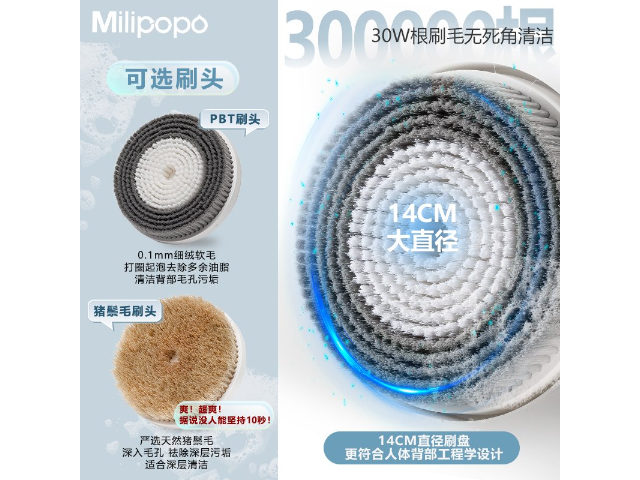
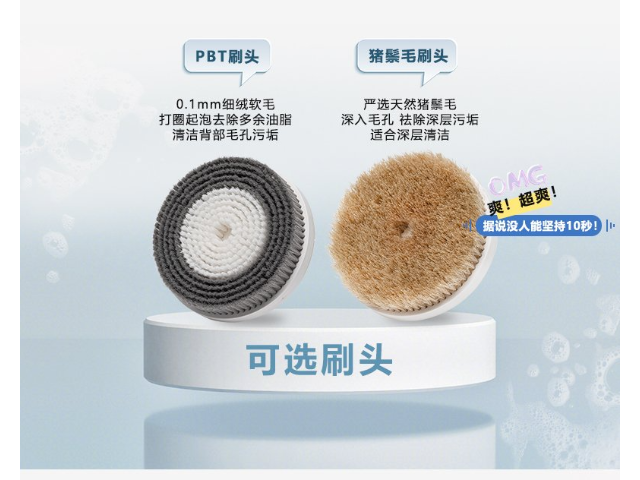
展望未来,洗澡搓背机市场具有广阔的发展前景。随着科技的不断进步和消费者需求的不断升级,洗澡搓背机将朝着更加智能化、人性化和个性化的方向发展。例如,未来的搓背机可能会配备更加先进的传感器和人工智能技术,能够根据用户的身体状况和沐浴习惯自动调整搓背模式和参数;还可能会与智能家居系统实现互联互通,用户可以通过手机APP或语音控制等方式远程操控搓背机,实现更加便捷的使用体验。同时,随着人们健康意识的不断提高,洗澡搓背机在医疗保健领域的应用也将不断拓展,为人们的健康生活提供更多的保障。智能搓背机采用旋转刷头设计,深入毛孔去除污垢死皮。浙江全自动搓背机厂家直销
电动搓背机采用360°旋转刷头,模拟人工搓澡动作,深层清洁背部毛孔污垢与角质。多功能搓背机
安装调试:如果是壁挂式搓背机,首先要按照产品说明书的要求,在浴室墙壁上准确地标记出安装孔的位置,然后使用电钻钻孔,并将膨胀螺丝插入孔中,拧紧螺母,将搓背机的挂板固定在墙上。接着,将搓背机主体挂在挂板上,并连接好电源线和水管(如果有)。对于落地式搓背机,只需将其放置在平稳的地面上,调整好底座的高度和水平度,接通电源和水源即可。在安装完成后,要检查各部件是否安装牢固,有无漏水漏电现象,并进行试运行,确保机器正常工作。准备工作:在使用洗澡搓背机之前,先调节好水温,一般适宜的水温在 38℃ - 42℃之间,既不会烫伤皮肤,又能保证良好的清洁效果。然后,根据个人需求,在搓背机的相应部位添加适量的沐浴露或身体磨砂膏等清洁用品。有些搓背机有专门的储物槽用于放置清洁用品,如果没有,可以将清洁用品涂抹在搓洗头上。开始使用:用户站在或坐在搓背机前,背部靠近搓洗头,按下启动按钮,选择合适的搓洗模式、时间和力度等参数。在使用过程中,要保持身体放松,自然地贴合搓背机,让搓洗头充分接触背部皮肤。根据机器的提示音或显示屏的信息,掌握搓洗的进度。当搓洗结束后,关闭机器电源,用清水冲洗掉身上的泡沫,再用毛巾擦干身体。多功能搓背机
传统搓背依赖人力的往复、旋转、按压动作,智能搓背机通过机械结构复刻这一动作逻辑,重心组件包括驱动电机、传动机构、搓背执行端三部分。驱动电机多采用直流无刷电机,具备噪音低、扭矩大、调速精细的特点,可根据预设程序调整转速和动力输出,适配不同力度需求;传动机构分为丝杆传动和皮带传动两种主流形式:丝杆传动通过电机带动丝杆旋转,驱动搓背执行端做直线往复运动,定位精度可达毫米级,适合精细的纵向搓背动作;皮带传动则更适合大范围、多角度的旋转搓背,配合万向节结构,可实现 360° 圆周搓背和多方向的按压动作。搓背执行端是与人体接触的重心部件,分为柔性接触层和刚性支撑层:刚性支撑层由强高度工程塑料制成,保证结构...
- 宁波好用的搓背机厂家供应 2026-03-07
- 浙江智能搓背机价格大全 2026-03-07
- 智能化搓背机推荐厂家 2026-03-07
- 象山老人搓背机 2026-03-07
- 宁波多功能搓背机供应商 2026-03-07
- 宁波电动搓背机厂家现货 2026-03-07
- 宁波定制搓背机定做价格 2026-03-06
- 北仑区搓背机生产 2026-03-06
- 国内搓背机生产 2026-03-06
- 宁波智能搓背机工厂直销 2026-03-06


- 宁波质量搓背机一般多少钱 2026-03-06
- 宁波挂壁式搓背机工厂直销 2026-03-06
- 电动洗澡搓背机公司 2026-03-06
- 多功能搓背机 2026-03-06
- 宁波国内搓背机厂家供应 2026-03-06
- 浙江国内搓背机定做价格 2026-03-06


- 宁波多功能搓背机供应商 03-07
- 宁波电动搓背机厂家现货 03-07
- 宁波定制搓背机定做价格 03-06
- 北仑区搓背机生产 03-06
- 国内搓背机生产 03-06
- 宁波智能搓背机工厂直销 03-06
- 智能化搓背机生产 03-06
- 浙江电动搓背机价格大全 03-06
- 电动搓背机销售厂家 03-06
- 宁波国内搓背机生产企业 03-06