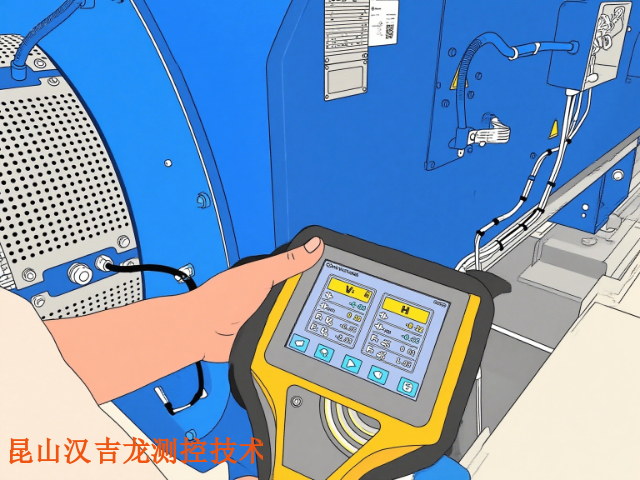
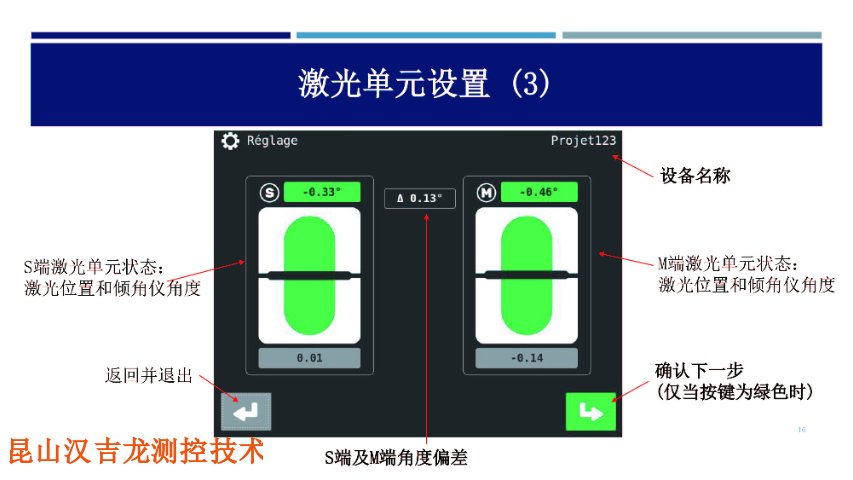
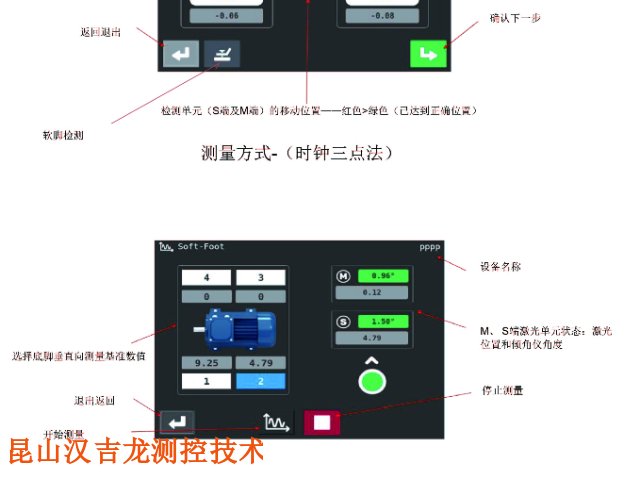
以柔性联轴器校准为例,实时数据验证的操作步骤通常包括:安装与初始校准:将激光发射器、探测器分别固定在电机轴与泵轴上,确保与轴同心,激光束投射至探测器中心后,系统自动采集初始偏差数据并显示在屏幕上。动态调整与数据监测:根据屏幕提示调整设备地脚(如增减垫片、左右平移),过程中实时观察径向/轴向偏差值变化...
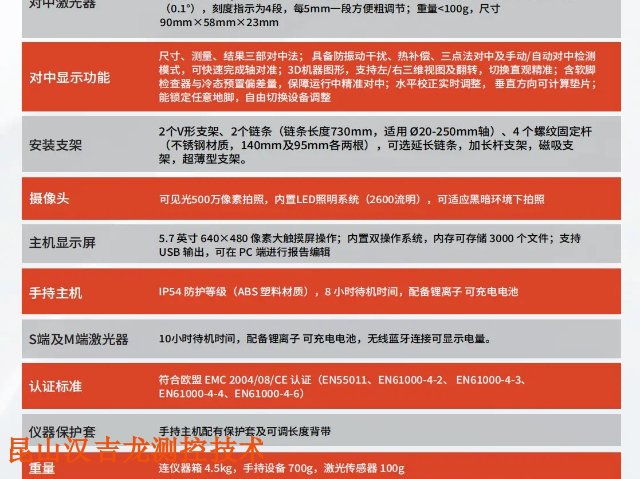
激光联轴器对中仪基本参数
- 品牌
- HOJOLO,LEAKSHOOTER
- 型号
- AS500
- 类型
- 激光对中仪
- 重量
- 1
- 产地
- 苏州
- 厂家
- 汉吉龙测控技术有限公司
激光联轴器对中仪企业商机
柔性联轴器专项调整策略结合HOJOLO的算法优势与柔性联轴器的弹性特性,采用“分步调整+动态补偿”方案:参数输入与补偿设置:进入设备的“柔性联轴器模式”,输入弹性体材质参数(如聚氨酯弹性模量2.5GPa)、工况温度(如正常运行温度70℃),系统自动加载热膨胀补偿算法(例如高温下弹性体径向膨胀系数1.2×10⁻⁵/℃);地脚调整:根据设备生成的调整方案操作,例如电机前地脚需增加0.2mm垫片、后地脚减少0.1mm垫片,调整时采用“对角紧固”原则(避**侧受力导致弹性体形变),每调整一次复核软脚状态(防止垫片变化引发新软脚)。2.精度验证与迭代优化静态复核:调整后重新执行12/3/6点测量,确保残余偏差符合标准(如API610规定离心泵柔性联轴器平行偏差≤0.05mm/m,HOJOLO校准后可控制在0.02mm/m以内);动态验证:装复联轴器螺栓(按对角线分次拧紧,扭矩符合手册要求,如M16螺栓扭矩45-50N・m),启动设备空载运行30分钟,用HOJOLO的振动监测模块(部分型号集成)检测振动速度,需满足ISO10816-3标准:柔性联轴器机组振动速度≤4.5mm/s(例如某破碎机校准后振动从12mm/s降至3.8mm/s)。激光联轴器对中仪针对特殊结构的联轴器,校准精度是否适用?机械激光联轴器对中仪使用视频
激光联轴器对中仪
数据记录:保存完整校准报告,包含冷态/热态偏差数据、软脚处理记录、调整垫片厚度及振动验证结果(HOJOLO设备支持U盘导出PDF报告);周期制定:根据工况确定复校周期,例如连续运行的化工泵组柔性联轴器建议每3个月复校一次,高温工况(>100℃)需缩短至1个月;异常标记:若校准后仍存在微小偏差(如0.03mm径向偏差),需在报告中注明是否在柔性联轴器补偿范围内(如弹性体允许吸收0.05mm以内偏差则无需进一步调整)。关键注意事项与常见误区规避避免过度调整:柔性联轴器无需追求“零偏差”,例如某型号橡胶弹性联轴器允许0.1mm径向偏差,过度调整可能导致弹性体预压缩变形,反而缩短寿命;热态补偿应用:高温工况下(如汽轮机柔性联轴器),需启用HOJOLO的热膨胀补偿功能,输入弹性体热膨胀系数(如橡胶为1.8×10⁻⁴/℃),校准后热态偏差可控制在0.02mm以内;螺栓紧固顺序:装复联轴器螺栓时需按“十字交叉法”分次拧紧,避**侧受力导致激光测量的偏差数据失真振动激光联轴器对中仪的作用激光联轴器对中仪的校准精度是否能满足高精度设备的运维需求?

即使采用抗振机型,操作不当仍可能导致精度不达标,需遵循以下规范:1.精度验证方法动态数据一致性检查:连续采集5组对中数据,若位移偏差波动≤0.003mm(工业抗振级机型),则判定振动干扰已有效抵消;外部基准对比:用高精度千分表(精度0.001mm)同步测量对中偏差,若激光仪数据与千分表差值≤0.005mm,则精度达标。2.关键操作要点安装位置优化:传感器需安装在距联轴器≤50mm处,避免振动放大效应(如轴端振动在300mm处会放大2-3倍);软脚与预调平:先消除设备软脚(地脚间隙>0.05mm需调整),确保基座水平误差<0.02mm/m,减少振动导致的设备整体晃动;参数预置补偿:对于热态高振动设备(如汽轮机),需预置热膨胀补偿量(0.20-0.30mm),避免冷态校准后热态运行时偏差超标。
短时间内(如10分钟内连续测量)数据波动主要源于三类干扰,其影响程度与控制方法如下:1.仪器自身稳定性光学系统漂移:单激光机型因光束发散角(通常0.1mrad)导致长距离(≥3m)测量时,光斑偏移可能达0.003mm/米,而双激光机型通过交叉验证可将漂移量控制在0.001mm/米内;电子元件噪声:探测器的暗电流噪声可能导致±0.001mm的随机波动,高温环境(>40℃)下噪声会翻倍,需依赖设备的温度补偿功能抑制偏差。2.操作规范性误差安装细节的微小差异会直接影响重复校准一致性,常见问题包括:支架固定偏差:磁力底座未完全贴合轴面(存在0.1mm间隙)会导致测量单元轻微晃动,使重复数据波动达0.005mm以上;参数输入一致性:若每次校准重新输入轴径、间距等参数(如误将50mm输为50.1mm),会导致计算结果出现系统性偏差(非随机波动)。激光联轴器对中仪针对大型电机轴系,校准精度依旧可靠吗?

激光联轴器对中仪的校准精度存在明确的数值范围体系,该范围受仪器硬件性能、测量原理、行业标准及实际工况共同约束,不同精度等级的设备对应差异化的数值区间。以下结合国内外校准规范(如JJF浙1196-2023)、主流品牌参数(HOJOLO、AS500等)及工业场景验证数据,从基础精度、行业标准、品牌差异、工况影响四个维度展开量化解析:一、基础精度数值范围:按测量维度划分激光对中仪的校准精度**分为径向偏差精度(平行错位)、角度偏差精度(倾斜错位)两类指标,不同精度等级设备的数值范围差异***:1.高精度机型(适用于汽轮机、精密压缩机)径向精度:基础测量精度可达±0.001mm,动态补偿后实际应用精度稳定在±1-3μm(如HOJOLOASHOOTER系列、法国AS500)。例如在石化厂压缩机对中案例中,ASHOOTER系列通过双激光束动态修正热膨胀误差,冷态与热态偏差控制在±2μm以内,较传统千分表法精度提升100倍;角度精度:角度测量分辨率≤±0.001°,重复性误差<±0.0005°。如AS500配备1280×960像素的CCD探测器,可捕捉0.0001°的微小角度偏移,满足膜片式柔性联轴器(允许角向偏差≤0.1°)的高精度校准需求。校准数据可导出为多种格式,激光联轴器对中仪方便融入企业运维系统。耦合激光联轴器对中仪批发
支持多轴联动设备同步校准,激光联轴器对中仪提升整体运维效率。机械激光联轴器对中仪使用视频
尽管**型号表现优异,但多轴系校准精度仍受以下因素制约,需在实际操作中规避:安装与环境干扰:多轴系的复杂布局可能导致激光光路遮挡,若传感器安装偏差>°,会使测量误差增大30%以上。此外,环境温度波动>2℃/小时或强电磁干扰(如靠近中频炉),可能导致AS300等中端型号的补偿算法失效,精度从。轴系累积误差传递:在3轴以上的长跨距系统中,单轴校准偏差会通过联轴器传递至整个轴系。例如某风电齿轮箱多轴校准中,未考虑低速轴与高速轴的偏差耦合关系,导致初始校准后仍存在,需通过AS500的跨轴数据融合功能重新优化调整方案。型号功能匹配度:基础型号因缺乏旋转轴轴心定位功能,无法完成五轴机床A/B轴的高精度校准;而AS500的红外热成像与振动分析功能虽能提升多轴诊断精度,但在*需简单对中的泵组场景中,可能因功能冗余导致操作效率下降(校准时间增加15%)。HOJOLO激光联轴器对中仪在多轴系校准中的精度表现可满足从基础工业到精密制造的分层需求:**型号(AS500)通过多技术协同实现微米级精度,适配高要求场景;中端及基础型号则以性价比优势覆盖常规需求。实际应用中需根据多轴设备的精度等级、工况复杂度及跨距参数,选择匹配的型号并严格遵循校准流程。 机械激光联轴器对中仪使用视频
与激光联轴器对中仪相关的文章

电机激光联轴器对中仪公司
- 无线激光联轴器对中仪装置 2025-12-24
- 国内激光联轴器对中仪批发 2025-12-24
- 工厂激光联轴器对中仪制造商 2025-12-24
- synergys激光联轴器对中仪定制 2025-12-24
- 欧洲激光联轴器对中仪维修 2025-12-23
- 法国激光联轴器对中仪服务 2025-12-23
- 汉吉龙测控激光联轴器对中仪的作用 2025-12-23
- 耦合激光联轴器对中仪怎么样 2025-12-23
- 马达激光联轴器对中仪现状 2025-12-23
- 基础款激光联轴器对中仪哪里买 2025-12-23
- 欧洲激光联轴器对中仪贴牌 2025-12-22
- 法国激光联轴器对中仪用途 2025-12-22
与激光联轴器对中仪相关的产品


与激光联轴器对中仪相关的新闻
-
瑞典激光联轴器对中仪操作步骤 2025-12-22 06:03:22短时间内(如10分钟内连续测量)数据波动主要源于三类干扰,其影响程度与控制方法如下:1.仪器自身稳定性光学系统漂移:单激光机型因光束发散角(通常0.1mrad)导致长距离(≥3m)测量时,光斑偏移可能达0.003mm/米,而双激光机型通过交叉验证可将漂移量控制在0.001mm/米内;电子元件噪声:探...
-
振动激光联轴器对中仪厂家 2025-12-21 10:03:02激光联轴器对中仪在高振动设备上的校准精度可通过机型匹配实现达标,**结论如下:机型选择原则:振动速度≤5mm/s选基础抗振级,5-15mm/s选工业抗振级(双激光+振动分析功能),>15mm/s需选极端抗振级(带ICP加速度计与实时补偿);精度保障底线:工业抗振级机型在15mm/s振动下可实现±0....
-
傻瓜式激光联轴器对中仪保修 2025-12-21 10:03:02激光对中仪需通过多维度技术设计抵消振动干扰,**保障机制包括:1.光学系统抗振设计双激光束逆向测量:相较于单激光,双光束可通过相位差补偿振动导致的光斑漂移,例如ASHOOTER系列采用635-670nm半导体激光器,长距离(10m)测量时光斑偏移量从单激光的0.003mm/米降至0.001mm/米;...
-
机械激光联轴器对中仪使用视频 2025-12-21 16:02:53柔性联轴器专项调整策略结合HOJOLO的算法优势与柔性联轴器的弹性特性,采用“分步调整+动态补偿”方案:参数输入与补偿设置:进入设备的“柔性联轴器模式”,输入弹性体材质参数(如聚氨酯弹性模量2.5GPa)、工况温度(如正常运行温度70℃),系统自动加载热膨胀补偿算法(例如高温下弹性体径向膨胀系数1....
与激光联轴器对中仪相关的问题
新闻资讯
产品推荐
-

CCD无线激光对中仪工作原理
2026-02-14 -

进口快速对中校正仪哪里买
2026-02-14 -
红外联轴器不对中测量仪现状
2026-02-14 -

专业级轴对中激光仪哪家好
2026-02-14 -

欧洲无线激光对中仪调试
2026-02-14 -
新一代联轴器振动红外对中仪激光
2026-02-13 -
CCD联轴器振动红外对中仪维修
2026-02-13 -

机械轴对中激光仪的作用
2026-02-13 -

经济型联轴器振动红外对中仪厂家排名
2026-02-13