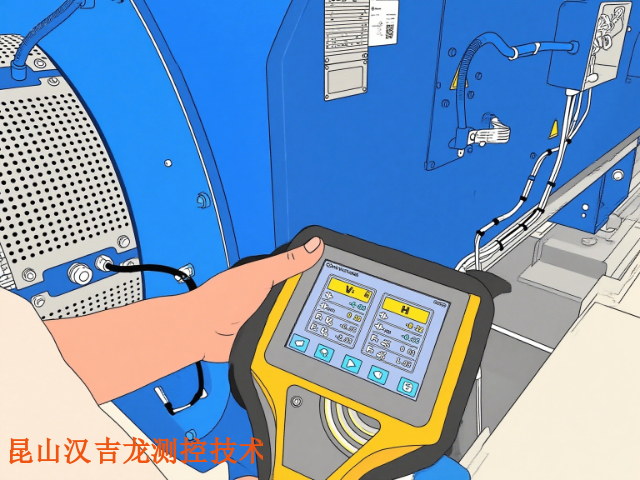
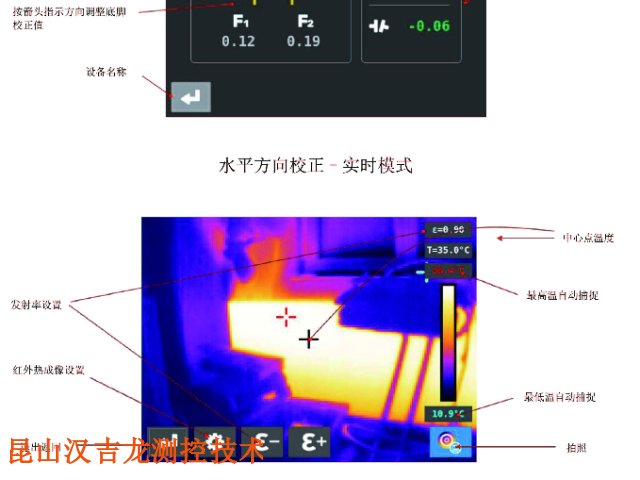
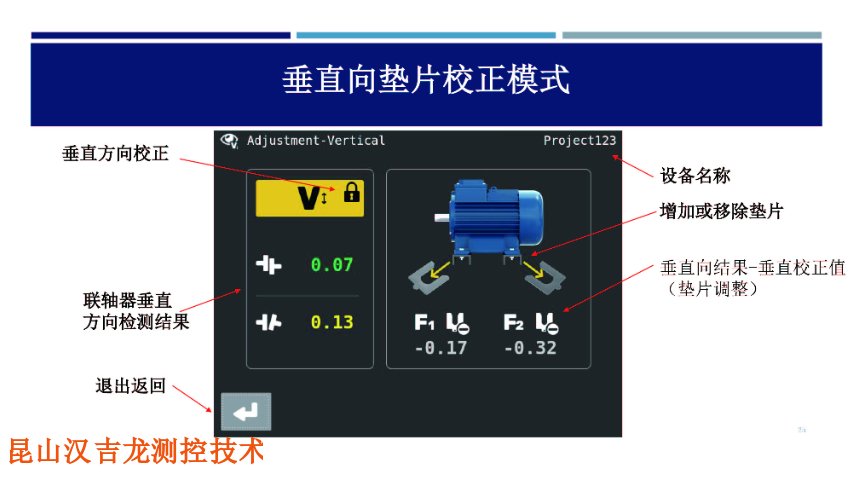
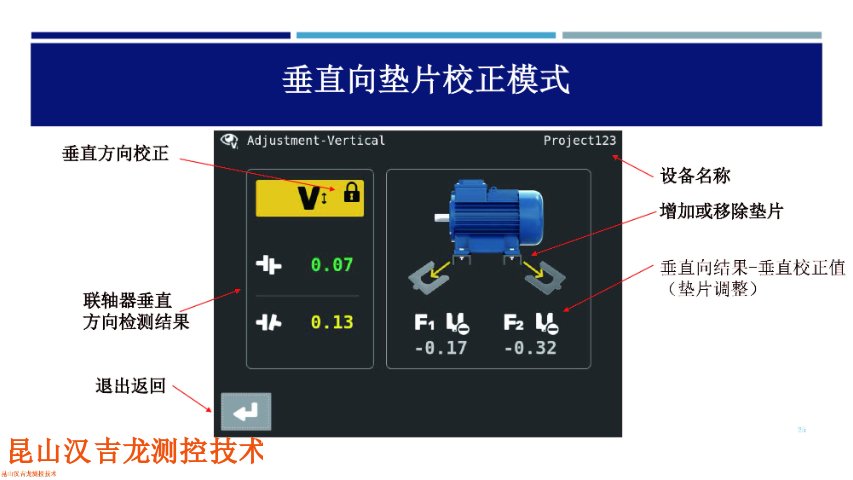
以柔性联轴器校准为例,实时数据验证的操作步骤通常包括:安装与初始校准:将激光发射器、探测器分别固定在电机轴与泵轴上,确保与轴同心,激光束投射至探测器中心后,系统自动采集初始偏差数据并显示在屏幕上。动态调整与数据监测:根据屏幕提示调整设备地脚(如增减垫片、左右平移),过程中实时观察径向/轴向偏差值变化...
激光联轴器对中仪基本参数
- 品牌
- HOJOLO,LEAKSHOOTER
- 型号
- AS500
- 类型
- 激光对中仪
- 重量
- 1
- 产地
- 苏州
- 厂家
- 汉吉龙测控技术有限公司
激光联轴器对中仪企业商机
复杂工况下的精度稳定性优势激光对中仪的**优势还体现在动态补偿与抗干扰能力上,这是传统工具难以实现的精度保障机制:环境适应性补偿:**机型(如AS500)集成温度传感器(精度±0.5℃),可实时补偿-20℃~50℃范围内的热胀冷缩误差。例如在钢铁厂高温环境中,轴系热膨胀导致的0.1mm径向偏移可被系统自动修正,而超声波对中仪因声波传播速度受温度影响(每℃变化导致0.17%误差),精度会***下降。振动与安装误差修正:激光对中仪通过高频数据采集(每秒数百次)与动态算法,可过滤设备运行中的微小振动干扰。如HOJOLO系列内置倾角仪,能实时监测测量支架的倾斜角度并自动补偿,避免因安装轻微松动导致的0.02mm以上偏差。而百分表完全依赖机械刚性固定,轻微振动就会导致指针抖动,读数误差增大。长距离测量稳定性:激光对中仪采用635-670nm稳定波长激光,光束发散角极小,配合IP54防护等级的测量单元,在10米范围内精度衰减≤0.005mm。例如在大型压缩机轴系对中(轴间距5米)中,激光对中仪仍能维持±0.01mm的位移精度,而超声波对中仪因声波衰减,5米距离误差会增至±0.05mm以上。激光联轴器对中仪校准大跨度轴系时,精度能稳定吗?教学激光联轴器对中仪企业
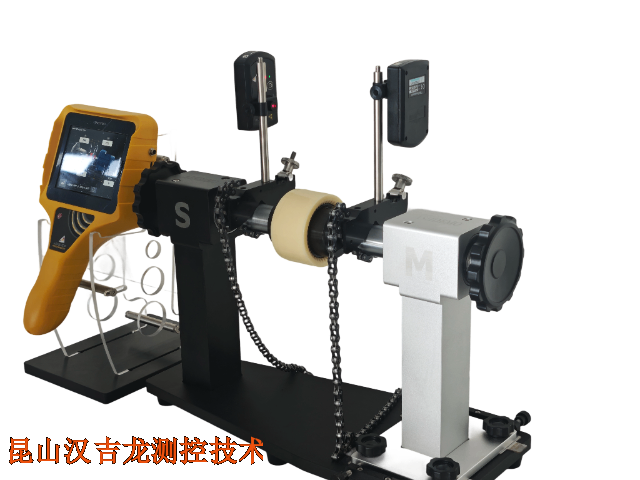
激光联轴器对中仪
实验室标定的精度数值会因现场工况产生衰减,不同环境下的精度变化范围可参考以下数据:温度影响:常温(20±5℃)下精度保持率100%;高温(100℃以上)未带热补偿功能的设备,精度衰减30%-50%(如±0.001mm级设备可能降至±0.0015-0.002mm),而带热补偿的HOJOLOASHOOTER系列可将衰减控制在10%以内(±2μm→±2.2μm);振动干扰:振动速度>4.5mm/s的工况(如破碎机),精度衰减20%-40%,需选择带振动滤波功能的机型(如AS500),通过算法抑制高频振动,使精度保持在±3-5μm;跨距影响:跨距每增加5米,精度误差累积增加±1-2μm。如HOJOLOASHOOTER在20米跨距下误差≤±10μm,而单激光技术的设备(如PRÜFTECHNIKOPTALIGN)可能达到±20μm。傻瓜式激光联轴器对中仪供应商激光联轴器对中仪可实时监测校准过程,避免人为操作失误影响结果。

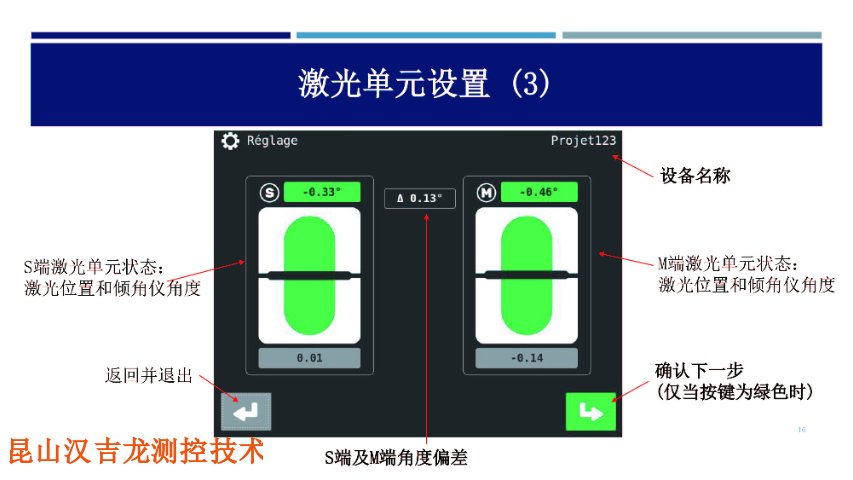
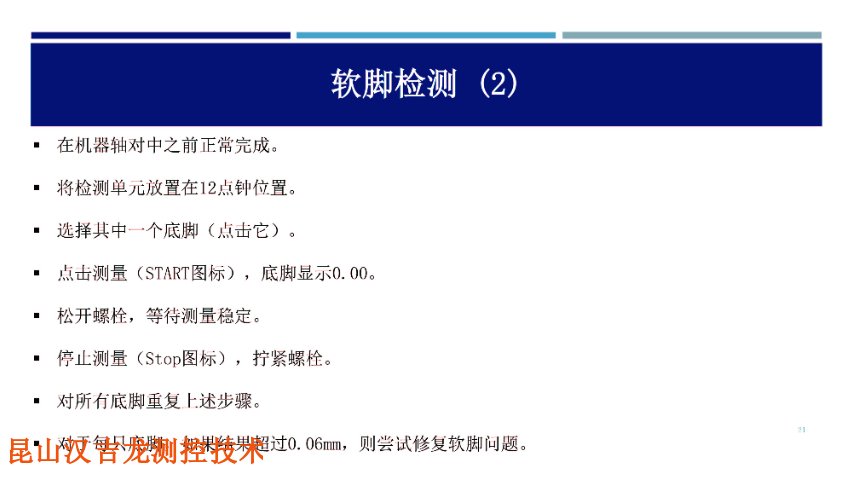
软脚检测(柔性联轴器校准关键前置环节)柔性联轴器的弹性补偿特性易掩盖软脚导致的隐性偏差,需优先通过激光对中仪的软脚测试功能消除底座形变干扰:参数设置:启动HOJOLO设备并进入“Softfoot”模式,输入测量参数:S(固定端激光探头)到M(移动端探头)的距离;S到动设备前地脚(F1)、后地脚(F2)的水平跨度;点位测量:将联轴器转动至12点钟位置(正上方),调整激光发射器使光束落在接收靶中心;依次松开并重新拧紧每个地脚螺栓,记录位移变化量(如松开螺栓时位移量>0.06mm需处理软脚);软脚处理:对超差地脚(如某脚位移0.07mm),通过增减不锈钢垫片(厚度精度0.01mm)找平,重复测量直至所有地脚位移量≤0.05mm(例如HOJOLO校准某风机时,将原0.08mm软脚偏差修正至0.02mm)。
不同类型柔性联轴器的校准案例验证了激光对中仪的精度适用性:弹簧体式柔性联轴器:某矿山破碎机采用该类型联轴器,校准前径向偏差0.15mm,激光对中仪校准后降至0.02mm,轴承温度从72℃降至45℃,联轴器使用寿命延长2倍;弹性体柔性联轴器:某制药厂离心泵(转速3000rpm)校准前,2倍转频振动幅值0.1mm,通过HOJOLOAS500校准后,偏差控制在0.02mm(符合转速3000rpm时柔性联轴器“优良”等级偏差标准≤0.04mm),电机电流从12.2A降至11.8A,能耗降低3.28%;滑块式柔性联轴器:某钢厂减速机联轴器校准前角向偏差0.8°,超出允许阈值(0.5°),激光对中仪通过角度偏差精细化调整,将偏差修正至0.1°,设备运行噪音从85dB降至72dB。激光联轴器对中仪校准柔性联轴器的精度是多少?

激光对中仪需通过多维度技术设计抵消振动干扰,**保障机制包括:1.光学系统抗振设计双激光束逆向测量:相较于单激光,双光束可通过相位差补偿振动导致的光斑漂移,例如ASHOOTER系列采用635-670nm半导体激光器,长距离(10m)测量时光斑偏移量从单激光的0.003mm/米降至0.001mm/米;高分辨率探测器:30mm视场CCD探测器(像素1280×960)可捕捉0.001mm的光斑位移,配合高速信号采集(采样率≥1kHz),能实时跟踪振动导致的光束位置变化。2.振动信号处理与补偿频谱滤波算法:通过FFT将振动时域信号转换为频谱,剔除设备不平衡(1X频率)、轴承故障(BPFO特征频率)等干扰,*保留对中偏差的有效信号;多传感器协同:集成振动传感器(测振动参数)、红外传感器(测温度形变)与激光对中模块,形成“振动-几何-温度”三维数据验证,例如某化工企业压缩机校准中,通过振动频谱(10-1000Hz)与激光对中数据交叉验证,确保偏差测量误差<0.002mm。激光联轴器对中仪在动态校准模式下,精度比静态校准更高吗?欧洲激光联轴器对中仪找正方法
激光联轴器对中仪在远程操控模式下,校准精度会打折扣吗?教学激光联轴器对中仪企业
短时间内(如10分钟内连续测量)数据波动主要源于三类干扰,其影响程度与控制方法如下:1.仪器自身稳定性光学系统漂移:单激光机型因光束发散角(通常0.1mrad)导致长距离(≥3m)测量时,光斑偏移可能达0.003mm/米,而双激光机型通过交叉验证可将漂移量控制在0.001mm/米内;电子元件噪声:探测器的暗电流噪声可能导致±0.001mm的随机波动,高温环境(>40℃)下噪声会翻倍,需依赖设备的温度补偿功能抑制偏差。2.操作规范性误差安装细节的微小差异会直接影响重复校准一致性,常见问题包括:支架固定偏差:磁力底座未完全贴合轴面(存在0.1mm间隙)会导致测量单元轻微晃动,使重复数据波动达0.005mm以上;参数输入一致性:若每次校准重新输入轴径、间距等参数(如误将50mm输为50.1mm),会导致计算结果出现系统性偏差(非随机波动)。教学激光联轴器对中仪企业
与激光联轴器对中仪相关的文章

电机激光联轴器对中仪公司
- 无线激光联轴器对中仪装置 2025-12-24
- 国内激光联轴器对中仪批发 2025-12-24
- 工厂激光联轴器对中仪制造商 2025-12-24
- synergys激光联轴器对中仪定制 2025-12-24
- 欧洲激光联轴器对中仪维修 2025-12-23
- 法国激光联轴器对中仪服务 2025-12-23
- 汉吉龙测控激光联轴器对中仪的作用 2025-12-23
- 耦合激光联轴器对中仪怎么样 2025-12-23
- 马达激光联轴器对中仪现状 2025-12-23
- 基础款激光联轴器对中仪哪里买 2025-12-23
- 欧洲激光联轴器对中仪贴牌 2025-12-22
- 法国激光联轴器对中仪用途 2025-12-22
与激光联轴器对中仪相关的产品


与激光联轴器对中仪相关的新闻
-
瑞典激光联轴器对中仪操作步骤 2025-12-22 06:03:22短时间内(如10分钟内连续测量)数据波动主要源于三类干扰,其影响程度与控制方法如下:1.仪器自身稳定性光学系统漂移:单激光机型因光束发散角(通常0.1mrad)导致长距离(≥3m)测量时,光斑偏移可能达0.003mm/米,而双激光机型通过交叉验证可将漂移量控制在0.001mm/米内;电子元件噪声:探...
-
振动激光联轴器对中仪厂家 2025-12-21 10:03:02激光联轴器对中仪在高振动设备上的校准精度可通过机型匹配实现达标,**结论如下:机型选择原则:振动速度≤5mm/s选基础抗振级,5-15mm/s选工业抗振级(双激光+振动分析功能),>15mm/s需选极端抗振级(带ICP加速度计与实时补偿);精度保障底线:工业抗振级机型在15mm/s振动下可实现±0....
-
傻瓜式激光联轴器对中仪保修 2025-12-21 10:03:02激光对中仪需通过多维度技术设计抵消振动干扰,**保障机制包括:1.光学系统抗振设计双激光束逆向测量:相较于单激光,双光束可通过相位差补偿振动导致的光斑漂移,例如ASHOOTER系列采用635-670nm半导体激光器,长距离(10m)测量时光斑偏移量从单激光的0.003mm/米降至0.001mm/米;...
-
机械激光联轴器对中仪使用视频 2025-12-21 16:02:53柔性联轴器专项调整策略结合HOJOLO的算法优势与柔性联轴器的弹性特性,采用“分步调整+动态补偿”方案:参数输入与补偿设置:进入设备的“柔性联轴器模式”,输入弹性体材质参数(如聚氨酯弹性模量2.5GPa)、工况温度(如正常运行温度70℃),系统自动加载热膨胀补偿算法(例如高温下弹性体径向膨胀系数1....
与激光联轴器对中仪相关的问题
新闻资讯
产品推荐
-
自主研发快速对中校正仪激光
2026-01-30 -

激光轴对中激光仪找正方法
2026-01-30 -
质量法兰联轴器对中仪价格
2026-01-30 -
ASHOOTER法兰联轴器对中仪校准规范
2026-01-30 -
工厂激光对中服务保养
2026-01-30 -
四川快速对中校正仪
2026-01-29 -
转轴联轴器不对中测量仪激光
2026-01-29 -

工业快速对中校正仪厂家排名
2026-01-29 -

汉吉龙测控联轴器对中服务工作原理
2026-01-29