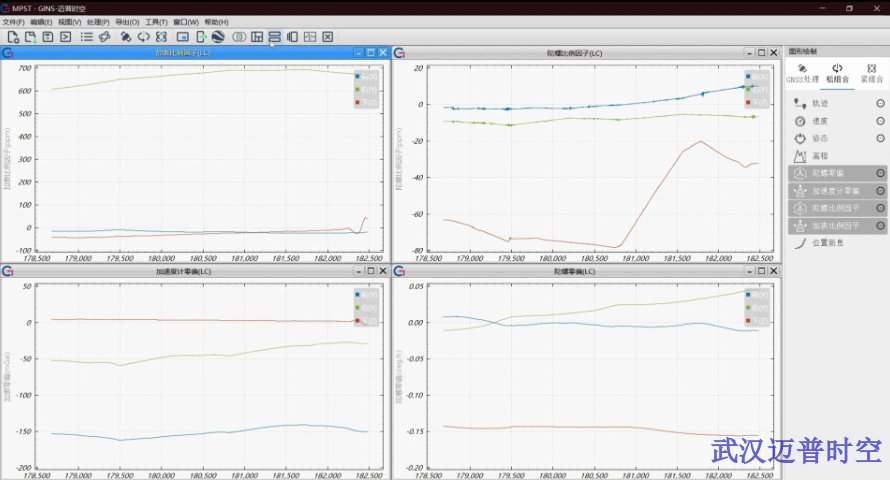
迈普时空InsRail软件的轨道三维姿态测量功能,为铁路线路的几何状态描述提供了一个全新的维度。传统的轨道几何测量主要关注平面的位置和高程的变化,而InsRail通过融合高精度惯性导航数据,能够连续测量轨道的三维姿态角。轨道的方位角描述了线路的走向变化,是曲线地段轨道几何状态的重要参数;轨道的俯仰角反映了线路的坡度变化,对于长大坡道区段的行车安全至关重要;而轨道的超高角(横滚角)则直接表征了曲线外轨的超高设置情况,是保障列车通过曲线时平稳性的关键。InsRail能够以毫米级的精度连续输出这些姿态参数,并与里程位置精确对应。当姿态参数出现异常突变时,往往预示着轨道结构存在问题,如扣件松动、路基沉降或不均匀冻胀等,为线路的预防性维护提供了更丰富的早期预警信息。MP-GINS双系统惯导数据处理完整支持北斗+GPS,符合自主可控发展战略。青海实时监控软件厂家

在铁路轨道测量中,里程信息的准确性是所有分析工作的基础,里程误差会导致病害定位偏差,给维修作业带来困扰。InsRail软件通过组合导航与高精度里程计的深度融合,实现了远优于传统测量手段的里程定位精度。软件在解算过程中,利用GNSS提供的高精度位置信息对里程计刻度因子进行实时标定和修正,同时利用非完整性约束和零速修正来抑制纯惯性导航下的里程漂移。这种多传感器融合的里程计算方法,使得InsRail蕞终的里程定位误差能够控制在5厘米以内。这意味着,当软件报告在K100+253.27处存在一处轨向不平顺时,现场作业人员可以非常精确地找到这个位置,无需再进行大范围的搜索。这种高精度的里程定位能力,将数据分析结果与现场作业紧密连接起来,大、大提高了维修养护的精、准度和效率。河南轨检数据后处理软件研发迈普时空MP-GINS紧耦合技术让低等级惯导在城市复杂环境中依然输出高精度结果。
迈普时空MP-GINS软件的自动零速修正功能,是专门针对城市测量中频繁启停工况设计的智能误差抑制技术。当移动测量车辆遇到红灯或交通拥堵需要临时停车时,组合导航系统如果继续按照惯性进行解算,微小偏差会随时间累积。MP-GINS软件能够通过检测IMU数据特征,智能识别出车辆处于静止状态的时刻,并立即触发零速修正机制。在静止期间,软件将速度真值锁定为零,利用这一信息反向估计和修正惯导的零偏误差、安装误差角等系统误差参数。当车辆再次起步时,系统已经过一轮误差清洗,能够以更纯净的状态重新开始导航。这种在频繁启停过程中不断自动“校零”的能力,对于保证城市、长距离移动测量的姿态精度和位置精度至关重要,它有效防止了误差的长时间积累,确保从早到晚的长时间作业都能保持高精度。
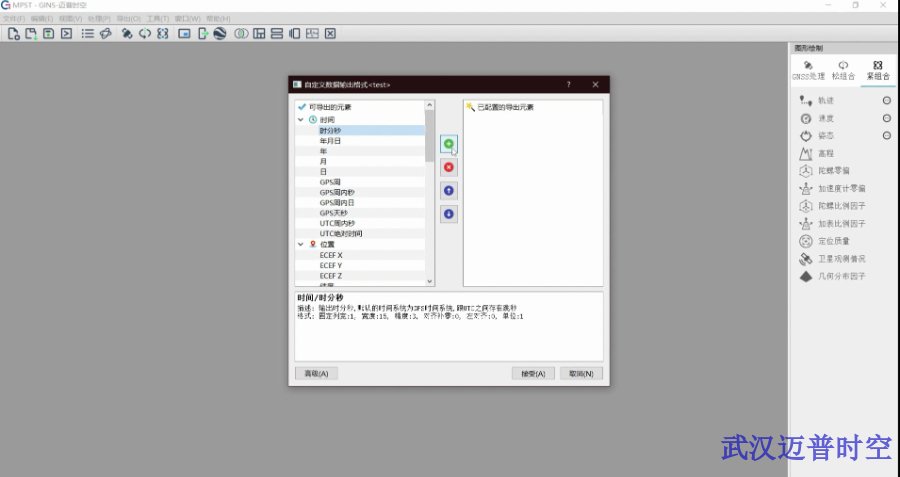
高精度轨道参数是进行轨道质量评估和维修决策的基础数据,InsRail软件的轨道参数测量模块能够基于组合导航轨迹和原始轨距数据,输出一系列高精度的轨道几何参数。首先,软件能够精确计算出轨道中线的三维坐标,这是数字孪生铁路和线路基础GIS数据的蕞核、心要素。其次,通过融合惯导的姿态信息和轨距测量值,软件可以反算出左右钢轨各自的三维空间坐标,为钢轨打磨和更换提供精确依据。此外,软件还能连续输出轨道的三维姿态,包括方位角、俯仰角和超高角,以及每个点的精确里程和实测轨距值。所有这些参数都以亚毫米级的精度呈现,用户可以将其导出为标准格式,导入到专业的轨道分析软件或铁路工务管理系统中,实现对轨道几何状态的精细化、数字化管理。MP-GINS支持高、端激光陀螺至低端MEMS惯导,紧耦合技术确保低等级惯导也能获取精确结果。
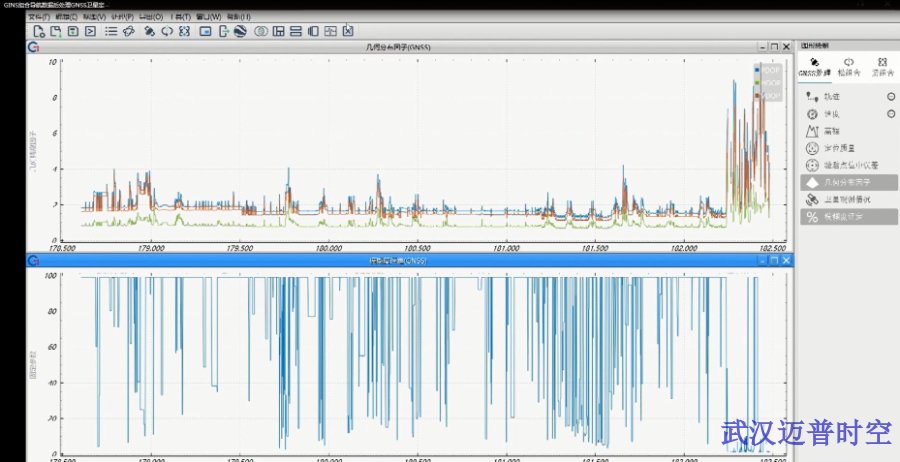
迈普时空MP-GINS软件不只技术领、先,更注重用户体验,通过精心设计的工程向导功能,帮助新用户快速掌握软件操作流程,轻松完成从数据导入到结果输出的完整数据处理工作。对于经验丰富的专业用户,软件提供了充足的高级选项设置,包括IMU参数优化、解算策略定制、数据筛选阈值调整等功能,完全契合测绘、地质、建筑、交通等不同行业的专业用途需求。这种兼顾易用性与专业性的设计理念,使得MP-GINS成为从入门级到专、家级用户的共同选择。迈普时空MP-GINS图形化数据分析工具直观展示卫星数量、误差曲线等关键质量指标。河南轨检数据后处理软件研发
迈普时空InsRail处理速度极快,可靠性高,为轨道几何测量提供高效精确解决方案。青海实时监控软件厂家
紧组合技术:两颗卫星也能精、准定位 在城市峡谷、茂密林荫或山区作业时,GNSS信号遮挡是困扰所有测绘工作者的核、心难题。MP-GINS采用业界领、先的紧组合处理模式,将GNSS原始观测值(伪距、载波相位)与IMU测量值进行深度融合,即使在可见卫星数量只有两颗的极端条件下,依然能够有效抑制惯导系统的发散,保持定位结果的可靠性和连续性。这种技术突破彻底改变了传统松组合模式下必须依赖四颗以上卫星才能解算的局面,为城市车载测量、无人机低空遥感等复杂场景提供了前所未有的定位保障,让每一次作业都能从容应对信号挑战。青海实时监控软件厂家
武汉迈普时空导航科技有限公司(简称“迈普时空”)是一家专业从事北斗精密定位定姿及应用的高、新、技、术企业。公司依托武汉大学卫星导航定位技术研究中心由中国工程院院士、“千人、计划”、“长江学者”、海外归国专、家5人合伙创立。公司致力于北斗GNSS/INS组合导航产品软硬件系统的集成、研发与应用,以定位定姿系统(POS)作为其GNSS/INS组合导航产品和服务的突破口,面向国内外车载、机载和船载的高精度定位定姿应用,在突破测绘遥感应用的基础上,为精密工程测量、移动测绘、高铁轨道几何形变检测等工程技术应用提供综合技术服务;为精细农业机械、无人机遥感、车载移动测绘、自动驾驶汽车等提供精、准定位定姿设备。