协作机器人,其实是一种能与人类在共同空间工作、近距离互动的机器人。简言之,就是能和人类一起「干活」。主要由机器人本体、中空力矩电机、谐波减速机、伺服驱动器、控制器组成。按照结构形式、载荷大小、力感知方式以及机器人轴数的不同,协作机器人可以分为十多种。不同载荷的协作机器人受应用场景和结构特点的限制,协作机器人载荷一般不会超过20kg。我们通常将轻载协作机器人的载荷定义在3-10kg,重载协作机器人载荷在10kg以上,桌面级协作机器人载荷小于3kg。反之则不成立,比如小于3kg的机器人不一定是桌面级机器人。轻载协作机器人是目前常见的协作机器人,主要用于消费电子、测试、医疗及服务行业;重载协作机器人常用于装配、搬运、码垛、包装等工业场景;桌面型协作机器人则应用于分拣、点胶、涂胶、自动化测试等工作场景。 达明机器人(上海)有限公司致力于提供AI协作机器人,期待您的光临!重庆液压AI协作机器人设计
协作机器人关节设计发展趋势。协作机器人在设计上有低压、轻量化需求,因此通常将伺服驱动器内置于关节,于关节内完成底层电气设备连接,以简化整机走线,降低配套设备重量,该类设计被称为一体化关节。协作机器人一体化关节内部结构较为复杂,除驱动器、电机、减速器、制动器、(单个)编码器等基础零部件外,通常内置更多传感设备,例如双编码器构造、力矩传感器甚至附加弹性件的SEA设计配合力觉、功能安全性、低刚度下的运动精度等需求。 北京包装AI协作机器人定制达明机器人(上海)有限公司是一家专业提供AI协作机器人的公司,欢迎您的来电哦!

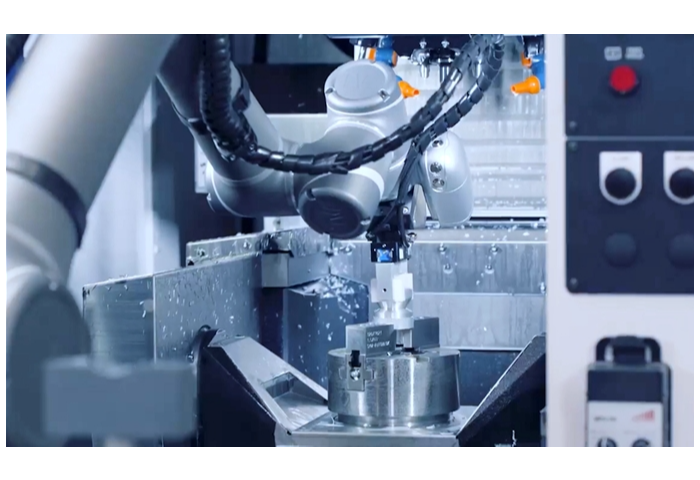
人工进行的精加工作业必须使用手动工具而且作业过程通常很费劲。工具所产生的震动也可能导致操作人员受伤。协作机器人可以提供精加工所需的力度、重复性和精确度。机器人可以完成的精加工类型包括抛光、研磨、去毛刺。机器人可以通过手动示教或计算机编程的方法教授机器人完成相应动作。协作机器人所具有的力控制系统使机器人更加耐用。通过末端执行器或内置的力传感装置,可以实现对不同尺寸零件的精加工。协作机器人还可以对零件进行质量检测。这一过程通常包含对成品零件的检测、对精密加工件拍摄高分辨率图片检测、零件与CAD模型的对比确认。固定多个高分辨率摄像头在协作机器人上可以将质量检测过程进行自动化,快速获得检测结果。使用协作机器人进行检测可获得高质量的检测,更加准确的生产批次。完成检测需要安装具有高分辨率摄像头的末端执行器、视觉系统和软件。
为了使协作机器人应用适合运行人员,还需要将安全操作原理应用于系统的其余部分,包括终端执行器和紧固装置。一些终端执行器是比较危险的,包括会出现尖锐边缘或高温的终端执行器,例如焊接应用中使用的终端执行器。在协作应用中,经过特殊设计的机器人可以与运行人员紧密合作,更高效率的完成任务。许多制造企业将专门为协作应用设计的机器人引入到他们的工厂设施中,以处理简单的取、放任务,但是这些机器人的多功能性,已经超出了取、放应用的范围。由于这些机器人允许对机器进行大量的人为控制和授权,因此它们可以完成许多重复的制造任务。 AI协作机器人,就选达明机器人(上海)有限公司,欢迎客户来电!

机器人和人交互,必须要保证的是人类安全,碰撞检测是协作机器人务必要达到的功能。传统机器人也有碰撞检测功能,但是传统机器人碰撞检测的目的一般是为了减少碰撞力对机器人本体的影响,避免机器人本体或者设损坏。协作机器人碰撞检测的功能是为了解决人和机器人共融的问题。其实现的方式,有借助力感知皮肤,关节力矩传感器,电流估算力反馈模型等方式。在实现的方式上,务必需要体现碰撞力的设置,以满足不同环境下力的灵活设置。 达明机器人(上海)有限公司致力于提供AI协作机器人,欢迎新老客户来电!广东加工机床AI协作机器人分类
达明机器人(上海)有限公司为您提供AI协作机器人,欢迎新老客户来电!重庆液压AI协作机器人设计
协作机器人为中国智能制造再添新彩。我国智能制造行业起步较晚,相比发达国家仍然存在一定差距。令人欣慰的是,我国通过对技术不断的自主研发、自主创新,已逐步摆脱对国外高新技术的依赖,并且在未来还会加大对研发的投入,完善发展智能制造产业政策,推进产业智能化转型。在新一轮科技和产业变革的推动下,符合现代化、自动化的装备提升了传统产业效率与质量,推动了技术红利替代人口红利,成为国内制造产业优化升级和经济持续增长的必然选择。 重庆液压AI协作机器人设计