协作机器人可以简化物料搬运、分拣、上下料和装箱操作,将工人从单一枯燥且繁重的工作中解放出来。再通过达明机器人集成创夹具及视觉,即使在非结构化环境中,达明机器人也能识别、拾取各种物体,部署于复杂度更的自动化生产流程中。且达明机器人易于编程,用户更可以通过其示教器快速部署任务,非常适合小批量应用以及重复性任务。配合车载装卸机构,可自动装载货物,无轨AGV小车自动行驶指定位置,机械手自动卸货,并放置到制定位置。可快速布局于自动化工厂、仓储分拣、自动化货物超市,实现物料自动搬运、物品上下料、物料分拣等。 达明机器人(上海)有限公司为您提供复合机器人,欢迎您的来电!安徽自动贴标复合机器人机构

半导体制造需要精细的光学处理,真空和气体,半导体行业制造工艺对清洁度和环境要求非常,通常很难通过人工操作来维持所需的洁净室条件。现有技术通过移动协作机器人代替人工在各个设备之间传输较大的物料,例如晶圆框架盒,不仅可以提工厂的生产效率,而且可以完全实现数字化生产,监控每一片晶圆的生产过程,保证产品的品质。然而,较大的物料将导致移动协作机器人的料仓较大,移动协作机器人整体体积较大、空间利用率降低,且较为笨重,整体移动所需的空间更多,每次移动卸载料仓的所有物料均需要整体移动,整体反复搬运移动的耗能更多,又降低了生产效率,且受到料仓体积限制,移动协作机器人搬运物料的步骤变得更加繁琐,进一步降低了生产效率。吉林复合机器人配件达明机器人(上海)有限公司为您提供复合机器人。

随着工厂内部制造复杂程度的日益上升,对于自动化设备柔性化的需求也更加迫切,相比于AGV和机械臂的单一功能,了两者特性的复合型机器人显然更具柔性化。在3C电子、医疗、日化品、机加工等传统制造业的零部件组装环节,复合型机器人可用于加工工件的搬运、装卸等作业,以满足车间全自动化柔性生产需求。比如无轨导航激光AGV小车加装机械手,配合车载装卸机构,可自动装载货物,无轨AGV小车自动行驶指定位置,机械手自动卸货,并放置到制定位置。可快速布局于自动化工厂、仓储分拣、自动化货物超市,实现物料自动搬运、物品上下料、物料分拣等。
复合机器人也称为移动机械臂、复合操作机器人和移动操作机器人。它们通常被称为英国移动操纵器。有一个复合机器人“手、脚、眼、脑”。与AGV/AMR机械手相比,单一功能不仅结合了两者的特点,而且更加灵活。半导体、33、C复合机器人可以在电子、医疗、日化、机械加工等传统制造业的零部件组装中发挥巨大作用,实现无人智能生产。目前,复合材料机器人的应用尚处于起步阶段,但发展迅速。生产线的柔性化复合机器人完成了一道工序就可以进行下一道工序,具有较的灵活性。并且多台复合机器人组成移动的装配台、加工台使用,可形成度柔性生产线。达明机器人(上海)有限公司致力于提供复合机器人,竭诚为您服务。

为客人打造专属的智能设备, 创造共生互利的竞争优势,制造效能的提升或是制造良率的提升,对整个的制造业有一个很正面的一个效益,并且得到客户的肯定,为客人带来智慧物流专案,帮助合作伙伴节省人力,并共同迈进关灯智能工厂。更安全的防护: 搭载两颗安全激光雷达,覆盖机器人360°无死角;更强大的调度: 智能划分作业场景,不同场景下自动切换工作模式,动态任务分配、智能交通管制、同场景多机调度,支持100台机器人的实时监控与调度每一台机器人都支持自动充电、手动充电与快速换电,0s即可让机器人重回到工作站点,保证24小时连续运行与快速响应。达明机器人(上海)有限公司是一家专业提供复合机器人的公司。北京AI复合机器人控制
达明机器人(上海)有限公司是一家专业提供复合机器人的公司,有想法可以来我司!安徽自动贴标复合机器人机构
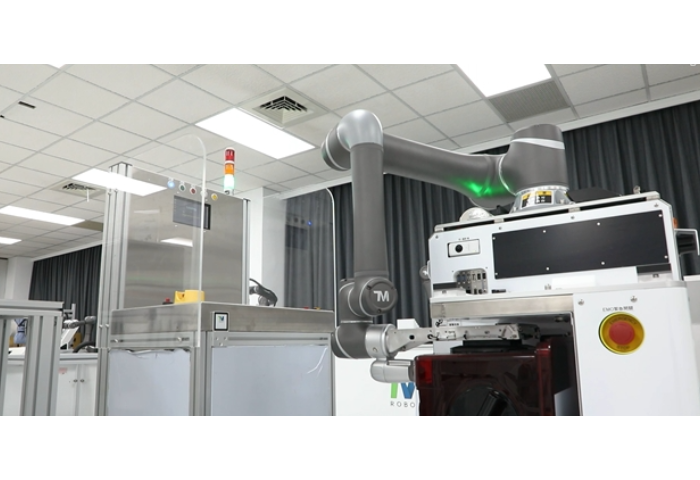
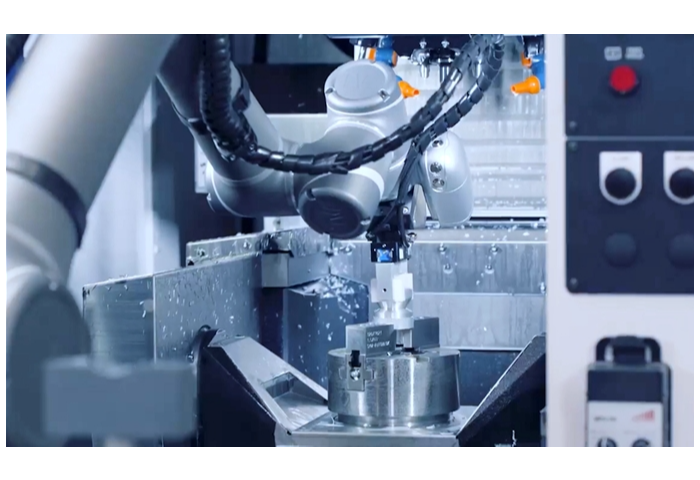
柔性复合机器人是一种度集成,结合多种技术得型科技产品,只要由协作机器人、AMR自主移动机器人、视觉系统、末端夹持系统及控制系统等多部分组成,其中,AMR自主移动机器人,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体得综合机器人系统。它集中了传感器技术、信息处理、电子工程、计算机工程、自动化控制工程以及人工智能等多学科的研究成果,目前已的应用于工业、农业、医疗、服务等行业。协作机器人,是一种能够与人协同工作的型工业机器人,协作机器人以轻量、安全、易操作、编程简单为特点,已的应用在工业、服务业等行业。视觉系统包括2D视觉系统、3D视觉系统,根据应用场景的不同,为智能机器配置不同的视觉方案,配合移动机器人解决机器人精确定位的问题,从何实现如CNC上下料等这类的精度应用。安徽自动贴标复合机器人机构