协作机器人关节设计发展趋势。协作机器人在设计上有低压、轻量化需求,因此通常将伺服驱动器内置于关节,于关节内完成底层电气设备连接,以简化整机走线,降低配套设备重量,该类设计被称为一体化关节。协作机器人一体化关节内部结构较为复杂,除驱动器、电机、减速器、制动器、(单个)编码器等基础零部件外,通常内置更多传感设备,例如双编码器构造、力矩传感器甚至附加弹性件的SEA设计配合力觉、功能安全性、低刚度下的运动精度等需求。达明机器人(上海)有限公司是一家专业提供AI协作机器人的公司,欢迎新老客户来电!上海餐饮零售AI协作机器人机构
为了使协作机器人应用适合运行人员,还需要将安全操作原理应用于系统的其余部分,包括终端执行器和紧固装置。一些终端执行器是比较危险的,包括会出现尖锐边缘或高温的终端执行器,例如焊接应用中使用的终端执行器。在协作应用中,经过特殊设计的机器人可以与运行人员紧密合作,更高效率的完成任务。许多制造企业将专门为协作应用设计的机器人引入到他们的工厂设施中,以处理简单的取、放任务,但是这些机器人的多功能性,已经超出了取、放应用的范围。由于这些机器人允许对机器进行大量的人为控制和授权,因此它们可以完成许多重复的制造任务。深圳达明AI协作机器人厂家AI协作机器人,就选达明机器人(上海)有限公司。

电子产业应用的协作机器人电子产业是协作机器人的新兴应用领域。协作机器人的主要任务包括电子产品的质量检测,例如智能手机芯片检测、PCB检测以及电脑处理器检测等等。尽管业界认为智能手机和个人电脑的年出货量未来二十年将保持稳定甚至略有下降,但IDTechEx认为,由于对其他电子产品的需求增加,全球对PCB的需求将持续上升。此外,与人工检测相比,使用协作机器人进行电子检测可以显著提高效率和准确性,并将潜在的人为错误降至比较低。然而,尽管有所增长,IDTechEx认为,协作机器人在电子产业的应用增长速度不会像上述应用领域那样快。
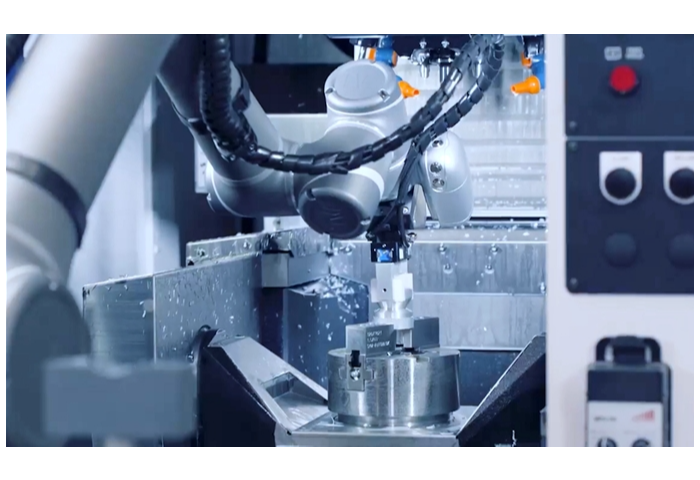
人工进行的精加工作业必须使用手动工具而且作业过程通常很费劲。工具所产生的震动也可能导致操作人员受伤。协作机器人可以提供精加工所需的力度、重复性和精确度。机器人可以完成的精加工类型包括抛光、研磨、去毛刺。机器人可以通过手动示教或计算机编程的方法教授机器人完成相应动作。协作机器人所具有的力控制系统使机器人更加耐用。通过末端执行器或内置的力传感装置,可以实现对不同尺寸零件的精加工。协作机器人还可以对零件进行质量检测。这一过程通常包含对成品零件的检测、对精密加工件拍摄高分辨率图片检测、零件与CAD模型的对比确认。固定多个高分辨率摄像头在协作机器人上可以将质量检测过程进行自动化,快速获得检测结果。使用协作机器人进行检测可获得高质量的检测,更加准确的生产批次。完成检测需要安装具有高分辨率摄像头的末端执行器、视觉系统和软件。达明机器人(上海)有限公司为您提供AI协作机器人,有想法的不要错过哦!

质量检测,通过对协作机器人安装具有高分辨率摄像头、探头或末端执行器、视觉系统和软件后可以对产品投影或拍摄影像进行多方面的测量,特别是一些比较微小的产品时这种方式用得比较多。像神兵精密工具所设计和生产的一些检测设备或检测治具,就会用到这方面的一些技术。包装应用,产品在运输进行前要进行适当的包装,包括箱体装配和装载、箱体整理等。这项应用要求对于外形不一致的产品,要有较强的视觉识别系统。同时把相关数据传送后台,以保持协作机器人数据与后台同步。协作机器人可应用于海关、港口、机场、物流基地,大型公司仓库之中。达明机器人(上海)有限公司致力于提供AI协作机器人,欢迎新老客户来电!深圳达明AI协作机器人厂家
达明机器人(上海)有限公司是一家专业提供AI协作机器人的公司,有想法可以来我司!上海餐饮零售AI协作机器人机构
协作机器人首先是需具备全级监控停止的功能,若有人进入到测试区域时,协作机器人必须停止作业;二是具备手动指引功能,协作机器人是根据操作员的触摸作用力来进行工作。三是具备速度和分离监控的功能,只有协作机器人与人之间有一定间隔距离时,协作机器人才能开始工作;四是功率和动力受控制器和内置设计的限制,当发生触碰事故时,协作机器人必须降低输出功率来防止碰撞事故发生;协作机器人需要满足其中至少一项,当协作机器人处于工作状态时,必须要有状态指示。上海餐饮零售AI协作机器人机构