近年来,工业机器人发展迅猛,而协作机器人作为其中的娇子,凭借着轻量化、柔性化的特点冲出重围,逐渐进入到了大众的视野当中,恰逢工业机器人行业大年,协作机器人乘着东风稳步向前,市场增速更是普遍高于其他类型的工业机器人。在实际应用中,许多制造业的非标产线上关于物体的定位多依赖于机械定位,机器人无需做物体的识别和定位只需要保证重复精度即可,这恰恰导致了机器人视觉配置渗透率较低,从而影响了机器人的智能化程度。视觉AI协作机器人,就选达明机器人(上海)有限公司,用户的信赖之选,有想法的不要错过哦!上下料视觉AI协作机器人分类
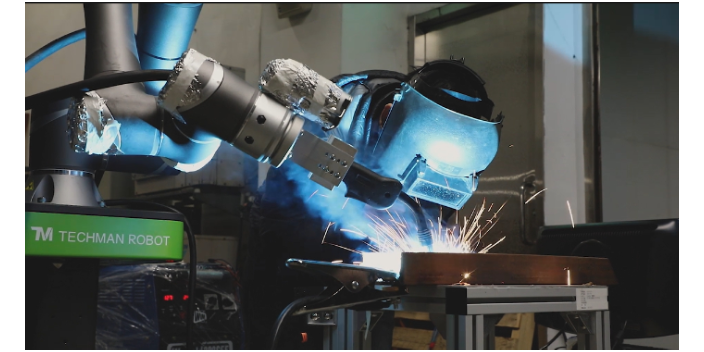
如果机器设备和机器人具备视觉能力,那就可以提升性能,我们可以更灵活地使用它们。将工业相机和图像处理系统与机器人相结合可以实现哪些应用?有哪些因素需要考虑呢?现代工业机器人通常配备一定数量的传感器,例如,可用于探测被抓取的部件,或在有碰撞危险时立即停止移动。但是,由传统传感器采集到的数据能提供有限的信息。如果系统可以提供图像处理功能,并采集和评估更多细节,则会具备明显的优势。通过结合视觉系统,并利用经评估的相机图像,机器人的决策能力会显著提高,可以灵活应对意外情况。这个优点对于快速增长的协作机器人(Cobot)领域尤为重要:为了与人直接合作,协作机器人没有屏蔽和保护装置。因此,预防安全事故,避免对工作人员的健康造成任何风险是首要工作。使用普通机器人可能会导致高成本和出现停工时间,例如当机器人因不正确的移动损坏了工件或其他自动化设备时。在这种情况下,相机系统可有助于提高集成机器人系统的可靠性。山东打标机视觉AI协作机器人批发达明机器人(上海)有限公司是一家专业提供视觉AI协作机器人的公司,有想法可以来我司!
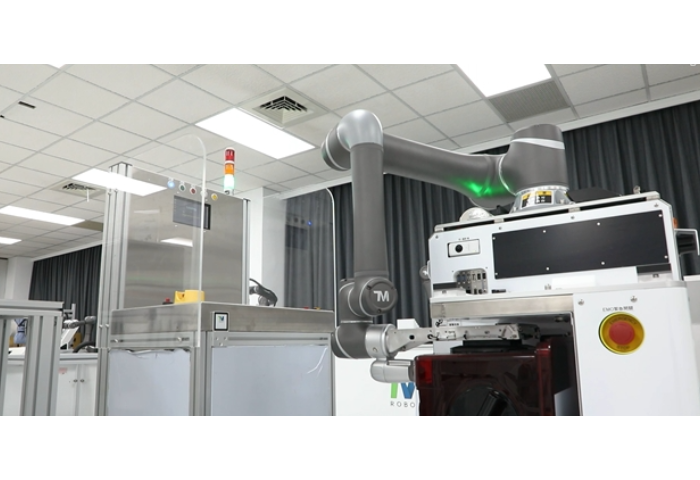
机器视觉是用机器来代替人眼进行目标对象识别、判断和测量的技术。机器视觉通过计算机模拟人的视觉功能,主要技术涉及目标图像获取技术、图像信息处理技术、目标对象测量与识别技术。典型机器视觉系统主要由视觉感知单元、图像信息处理与识别单元、处理结果显示单元和视觉系统控制单元组成。相机能够实时的“看到”工件所处的位置以及姿态,自动判断得到下一个抓取的工件信息。机械臂系统根据相机的分析结果,自动规划路径并同时避开障碍物实现对工件的抓取。
生产线中,我们需要确定产品的空间三维坐标,才能进行自动化生产的下一步动作,避免整个自动化设备成为无头苍蝇,通过工业相机对产品进行拍照抓取,视觉软件的分析对比,获得产品的准确位置,从而开始下一步的生产动作。图像识别顾名思义就是处理分析我们获得的图像信息,通过识别各种目标来满足生产动作的要求,当然了比较常见的就是读取条码及二维码应用,在生产制造中,我们通常要采用mes系统进行管理,此时物料追溯等应用便需要进行赋码读码,而视觉便是提供这项应用,不同的材质通过不同的视觉集成系统来完成,从而进一步提高现代化生产水平。达明机器人(上海)有限公司致力于提供视觉AI协作机器人,有需要可以联系我司哦!

视觉成像初是从二维(2D)图像处理与理解,即2D视觉成像发展起来的。2D视觉技术主要根据灰度或彩色图像中的像素灰度特征获取目标中的有用信息,以及基于轮廓的图案匹配驱动,识别物体的纹理、形状、位置、尺寸和方向等。2D视觉技术距今已发展了30余年,在自动化和产品质量控制过程中得到广泛应用,目前技术较为成熟,主要用于字符与条码识读、标签验证、形状与位置测量、表面特征检测等。2D视觉技术难以实现三维高精度测量与定位,二维形状测量的一致性和稳定性也较差,易受照明条件等影响。视觉AI协作机器人,就选达明机器人(上海)有限公司,让您满意,期待您的光临!重庆大负载视觉AI协作机器人编程
视觉AI协作机器人,就选达明机器人(上海)有限公司,有需求可以来电视觉AI协作机器人!上下料视觉AI协作机器人分类
在智能制造过程中,通过传统的编程来执行某一特定动作的机器人(机械手、机械手臂、机械臂等,未作特殊说明时,不作严格区分,统一称为机器人),将难以满足制造业向前发展的需求。很多应用场合下,需要为工业机器人安装一双眼睛,即机器视觉成像感知系统,使机器人具备识别、分析、处理等更高级的功能。这在高度自动化的大规模生产中非常重要,只有当工业机器人具有视觉成像感知系统,具备观察目标场景的能力时,才能正确地对目标场景的状态进行判断与分析,做到智能化灵活地自行解决发生的问题。上下料视觉AI协作机器人分类