根据其系统结构特点,复合机器人由三大部分组成。 移动底盘:即复合机器人的“腿”,用于实现复合机器人在不同方向上的灵活移动。一般使用移动机器人(AGV/AMR)本体。 机械臂:复合机器人的“手”,实现复合机器人对物件的抓取或加工的操作。一般使用协作机器人本体。 终端控制器:相当于复合机器人的大脑部分,可以直接或者通过人工对机器人的动作进行控制。相当于对移动机器人的控制部分与协作机器人的控制部分做了一定程度的集成。拥有“手脚”两项功能的复合型移动机器人能够很好地解决当下半导体行业人工搬运震动值大导致原料损耗、人工搬运不稳定影响综合稼动率,导致产能浪费的问题,未来的应用前景非常之大。复合机器人,就选达明机器人(上海)有限公司,用户的信赖之选,有需要可以联系我司哦!辽宁小负载复合机器人加工

柔性复合机器人是一种度集成,结合多种技术得型科技产品,只要由协作机器人、AMR自主移动机器人、视觉系统、末端夹持系统及控制系统等多部分组成,其中,AMR自主移动机器人,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体得综合机器人系统。它集中了传感器技术、信息处理、电子工程、计算机工程、自动化控制工程以及人工智能等多学科的研究成果,目前已的应用于工业、农业、医疗、服务等行业。协作机器人,是一种能够与人协同工作的型工业机器人,协作机器人以轻量、安全、易操作、编程简单为特点,已的应用在工业、服务业等行业。视觉系统包括2D视觉系统、3D视觉系统,根据应用场景的不同,为智能机器配置不同的视觉方案,配合移动机器人解决机器人精确定位的问题,从何实现如CNC上下料等这类的精度应用。广东灵活识别复合机器人分类达明机器人(上海)有限公司致力于提供复合机器人,有想法可以来我司。

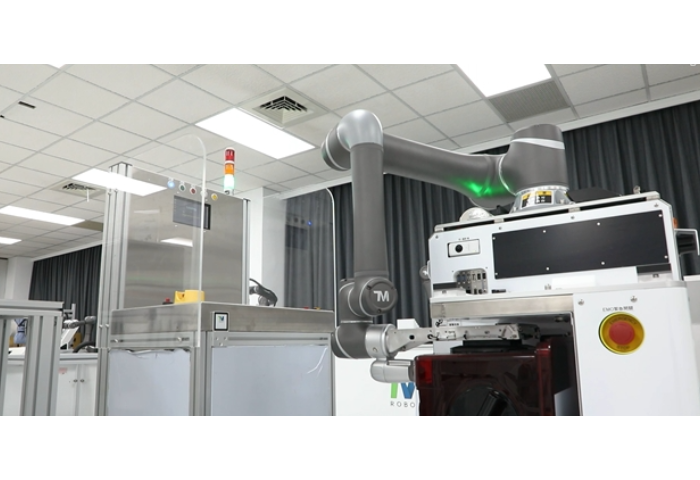
半导体制造需要精细的光学处理,真空和气体,半导体行业制造工艺对清洁度和环境要求非常,通常很难通过人工操作来维持所需的洁净室条件。现有技术通过移动协作机器人代替人工在各个设备之间传输较大的物料,例如晶圆框架盒,不仅可以提工厂的生产效率,而且可以完全实现数字化生产,监控每一片晶圆的生产过程,保证产品的品质。然而,较大的物料将导致移动协作机器人的料仓较大,移动协作机器人整体体积较大、空间利用率降低,且较为笨重,整体移动所需的空间更多,每次移动卸载料仓的所有物料均需要整体移动,整体反复搬运移动的耗能更多,又降低了生产效率,且受到料仓体积限制,移动协作机器人搬运物料的步骤变得更加繁琐,进一步降低了生产效率。
复合机器人通常不会使用传统的磁导航AGV,往往会选择更先进的导航方式,比如MIKELIMEI SLAM激光导航AGV。与其他导航方式相比,SLAM激光导航AGV具有以下优点:自主路径规划、自主导航、完全无轨和自由路径行走,提了复合机器人的灵活性。复合机器人以度的灵活性完成下一个过程。多个复合材料机器人形成移动装配平台,加工平台可以形成度协作。机器人和合作机器人企业抢占市场,这也是两种机器人快速增长的主要原因。要有3D激光机器视觉来分辨;当然还要让机器人多进行深度学习以提智能化,那要有AI来相助达明机器人(上海)有限公司为您提供复合机器人,有需要可以联系我司哦!

根据MIR DATABANK数据显示,中国移动机器人市场规模从2018年到2021年几乎呈现了翻倍增长,其中2021年同比增速近30%。移动机器人市场发展步入快车道,国家同步出台了《“十四五”机器人产业发展规划》对移动机器人给予重点关注。提出到2025年将中国建设成为全球机器人技术创策源地、制造集聚地和集成应用地的目标。搬运一个8寸的晶圆盒相当于将千万元背在机器人身上,一旦出现一次损失可能这家企业就要离开这个行业了;是精度要求,在对接机台时不能出现任何偏差。 复合机器人,就选达明机器人(上海)有限公司,欢迎客户来电!辽宁小负载复合机器人加工
复合机器人,就选达明机器人(上海)有限公司,用户的信赖之选,有想法可以来我司!辽宁小负载复合机器人加工
基于智能移动机器人、协作机器人、视觉识别等技术的综合应用。可快速布置于自动化工厂、仓储分拣、自动化货物超市,实现物料自动搬运、CNC上下料、自动分拣等功能。 技术规格: 常规负载:20kg 运行速度:0.5/0.8m/s 手臂末端综合作业精度:<0.5mm 定位技术:Mark定位 导航:激光导航 人工智能:人工智能技术可以帮助机器人进行决策和规划。通过机器学习、深度学习等技术,机器人可以自主地学习并实现自主规划,实现更加复杂的任务。 控制系统:控制系统可以帮助机器人控制其运动和行为。控制系统通常由计算机程序和电子设备组成,可以让机器人实现精度的运动和行为控制。辽宁小负载复合机器人加工