随着我国各行各业生产运营的蓬勃发展,各领域如仓储分拣、无聊自动搬运与分拣、电力巡检、自动化超市以及自动工厂等对柔性化、智能化的作业需求的欲望越来越大,这种大背景的影响使得我国相关科研人员,开展了关于柔性复合机器人的研究工作,柔性复合机器人的整个机体是由AMR车载控制器、柔性协作机械臂、AMR定位导航系统、AMR伺服驱动系统、BMS系统等所构成,各个子系统与主系统之间的交流与沟通均可以通过CAN总线来进行,对于机器人各个部分的设计也采用了分区块划分的形式,这种模块化的设计特点对于机器人期的拆装更换、维护维修等方面是十分便利的。柔性复合机器人的运作是不需要进行任何控制柜的外接的,这对于机器人的抓取、行走等行为的控制来说也十分方便。达明机器人(上海)有限公司致力于提供复合机器人,期待您的光临!浙江仓库搬运复合机器人

半导体行业对机器人要求极,首先是洁净度。就目前复合移动机器人应用量的封测厂来说,封装前段厂房洁净度要求能达到十级。另外,想要突破洁净度限制进入晶圆厂,洁净度更是要达到ISO CLASS 3以上。 其次是震动等级,比如其中一道减薄划片工艺中,如果搬运中超过0.5g的振动,就会破屏,一个晶圆盒就是几十万元的损失;再次是安全等级,在人机交互的场景里,机器人不能撞到设备,第二不能撞到人,这些都需要满足安全认证;再之是稳定性要求,搬运一个8寸的晶圆盒相当于将千万元背在机器人身上,一旦出现一次损失可能这家企业就要离开这个行业了;是精度要求,在对接机台时不能出现任何偏差。上海AMR复合机器人推荐复合机器人,就选达明机器人(上海)有限公司,有需求可以来电复合机器人!

复合型机器人的组成部分包括: 机械臂:复合型机器人通常拥有一个或多个机械臂,可以完成的机械加工、装配和拆卸等工作。机械臂可以是任意数量的关节连接起来的,具有度的自由度和灵活性,可根据任务需要进行调整。 移动平台:移动平台通常是机器人的底盘,它可以让机器人在不同的地面上自由移动。移动平台可以使用轮子、履带或腿来实现,具有度的机动性。 传感器:传感器可以让机器人感知周围的环境,如视觉传感器、声音传感器、触觉传感器等。这些传感器可以帮助机器人自主地感知周围环境,并根据需要采取行动。 视觉系统:视觉系统包括相机、激光扫描仪、红外传感器等,可以帮助机器人感知周围的环境和识别物体。视觉系统通常与人工智能技术相结合,可以让机器人学习和识别更复杂的物体和场景。 人工智能:人工智能技术可以帮助机器人进行决策和规划。通过机器学习、深度学习等技术,机器人可以自主地学习并实现自主规划,实现更加复杂的任务。 控制系统:控制系统可以帮助机器人控制其运动和行为。控制系统通常由计算机程序和电子设备组成,可以让机器人实现精度的运动和行为控制。
随着工厂内部制造复杂程度的日益上升,对于自动化设备柔性化的需求也更加迫切,相比于AGV/AMR、协作机器人、机器视觉的单一功能,了三者特性的复合移动机器人显然更具柔性化。以一个简单的工业场景来描述“复合机器人”:AGV小车机器人,负责在厂区运送物料;但AGV做不了把物料从车上取走,这就需要在AGV上装上“协作机器人”。协作机器人就是轻型六轴机械臂,由它们来搬取和作业;为了识别各种不规范情形(比如倾斜、反转、翻倒等),要有3D激光机器视觉来分辨;当然还要让机器人多进行深度学习以提智能化,那要有AI来相助。达明机器人(上海)有限公司是一家专业提供复合机器人的公司,有想法可以来我司!

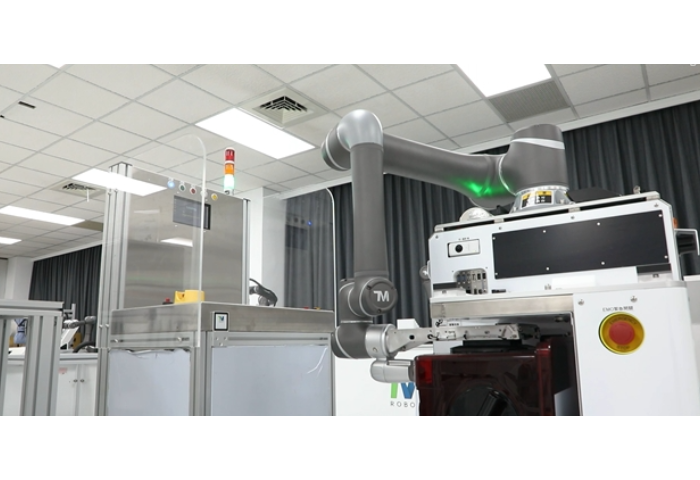
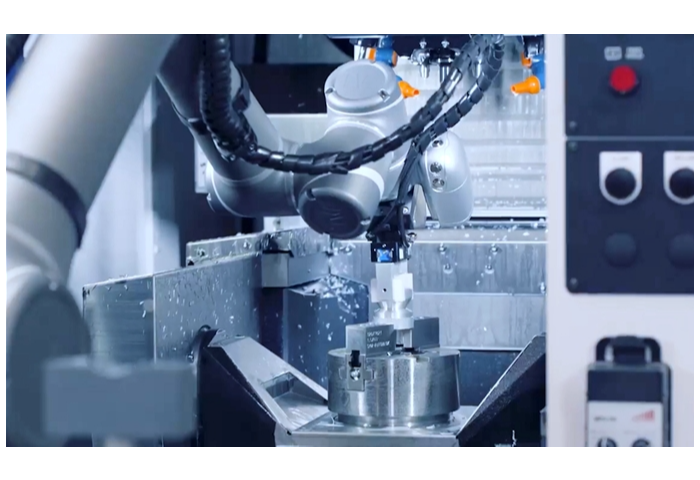
达明机器人针对AGV/AMR搭配的复合机器人应用场景,推出直流电源版本的手臂(M系列),透过TM特有的Landmark及TMvision视觉系统建立动态相对坐标体系并实现跨手臂点位共享,弥补AMR行走的运动偏差并定位、平稳取放,非常适用于医疗及半导体行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性、精度的应用。这种模块化的设计特点对于机器人期的拆装更换、维护维修等方面是十分便利的。柔性复合机器人的运作是不需要进行任何控制柜的外接的,这对于机器人的抓取、行走等行为的控制来说也十分方便。达明机器人(上海)有限公司致力于提供复合机器人,竭诚为您服务。上海半导体复合机器人设计
达明机器人(上海)有限公司致力于提供复合机器人,欢迎您的来电!浙江仓库搬运复合机器人
协作机器人可以简化物料搬运、分拣、上下料和装箱操作,将工人从单一枯燥且繁重的工作中解放出来。再通过达明机器人集成创夹具及视觉,即使在非结构化环境中,达明机器人也能识别、拾取各种物体,部署于复杂度更的自动化生产流程中。且达明机器人易于编程,用户更可以通过其示教器快速部署任务,非常适合小批量应用以及重复性任务。配合车载装卸机构,可自动装载货物,无轨AGV小车自动行驶指定位置,机械手自动卸货,并放置到制定位置。可快速布局于自动化工厂、仓储分拣、自动化货物超市,实现物料自动搬运、物品上下料、物料分拣等。 浙江仓库搬运复合机器人