对于机器人,让工业机械手或机器人“睁开”一双眼睛,机器视觉为它们提供了精密的计算系统和处理系统,可以模拟生物视觉成像和信息处理方法,从而使机器人更像人类,并且可以灵活地执行操作,识别,比较和处理方案,生成执行指令,然后一次性完成所有操作。这是传统机器人目前无法实现的动作,这使得机械手在功能开发和领域扩展方面取得了重大突破。视觉机器人将在未来十年中在智能设备领域占据重要地位。机器视觉作为机器人(尤其是智能视觉机器人)的重要组成部分之一,对于提高机器人的灵活性和可操作性具有重要意义。达明机器人(上海)有限公司致力于提供视觉AI协作机器人,有想法可以来我司。浙江组装视觉AI协作机器人设计
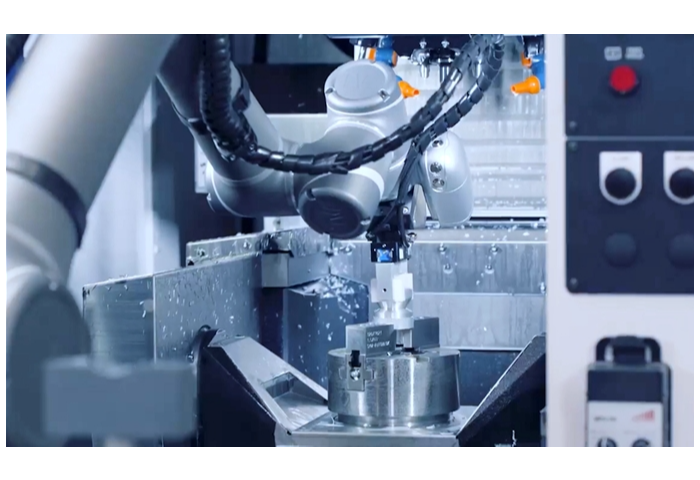
在视觉技术的不断成熟中,应用领域也在进一步扩大。在生产过程中,我们在用机器人取代人工后,有一个重要的生产动作——上下料抓取,这种场景在现代化工厂很常见,而这项应用主要建立于视觉识别、视觉检测的集成技术上,在实际应用中,整个系统通过对目标进行图像抓取,图像分析,输出结果,推动机器人进行生产动作,实现对物料的抓取、摆放。从起初用机器代替人眼的畅想概念,到如今检测人眼看不到的产品需求,在这种持续生产自动化推进的转变中,我们为工业生产集成提供了重要途径。广东组装视觉AI协作机器人品牌达明机器人(上海)有限公司为您提供视觉AI协作机器人,期待为您服务!

机器人视觉系统常见的功能是检测已知物体的位置和方向。因此,在大多数集成视觉解决方案中通常都克服了围绕这两个方面的挑战。只要可以在摄像机图像中查看整个对象,检测对象的位置通常很简单(请参见“遮挡”以了解如果缺少部分对象会发生什么)。许多系统对于改变物体的方向也很鲁棒。但是,并非所有方向都相等。尽管检测沿一个轴旋转的对象非常简单,但是检测对象何时经历了各种3D旋转则更为复杂。图像的背景对物体的检测有很大的影响。想象一个极端的例子,将对象放在一张纸上,上面印有该对象的图像。在这种情况下,机器人视觉设置可能无法确定哪个是真实对象。理想的背景将为空白,并与检测到的物体形成良好的对比。它的确切属性将取决于所使用的视觉检测算法。如果使用边缘检测器,则背景不应包含锐利的线条。背景的颜色和亮度也应与对象的颜色和亮度不同。
视觉测量就是通过视觉算法提取图像的边缘,轮廓等信息,进行非接触的尺寸测量,位置度测量和高度测量。视觉测量具有精度高、速度快的特点,由于不用接触产品,有效避免了人工测量对产品造成的二次伤害。测量视觉系统一般使用远心镜头和平行背光源进行获取更清晰的图像轮廓,通过高精度的标定片把像素坐标转换成物理坐标,然后再通过找边,找圆,提取轮廓,查找平面,求距离等视觉工具方法进行几何测量。典型的应用场景有OMM光学测量仪,一键测量仪,锂电池长宽测量和厚度测量,PIN针位置度检测和PIN针高度检测等。达明机器人(上海)有限公司致力于提供视觉AI协作机器人,有需求可以来电!

如果机器设备和机器人具备视觉能力,那就可以提升性能,我们可以更灵活地使用它们。将工业相机和图像处理系统与机器人相结合可以实现哪些应用?有哪些因素需要考虑呢?现代工业机器人通常配备一定数量的传感器,例如,可用于探测被抓取的部件,或在有碰撞危险时立即停止移动。但是,由传统传感器采集到的数据能提供有限的信息。如果系统可以提供图像处理功能,并采集和评估更多细节,则会具备明显的优势。通过结合视觉系统,并利用经评估的相机图像,机器人的决策能力会显著提高,可以灵活应对意外情况。这个优点对于快速增长的协作机器人(Cobot)领域尤为重要:为了与人直接合作,协作机器人没有屏蔽和保护装置。因此,预防安全事故,避免对工作人员的健康造成任何风险是首要工作。使用普通机器人可能会导致高成本和出现停工时间,例如当机器人因不正确的移动损坏了工件或其他自动化设备时。在这种情况下,相机系统可有助于提高集成机器人系统的可靠性。达明机器人(上海)有限公司为您提供视觉AI协作机器人,期待您的光临!电子组装视觉AI协作机器人哪家好
视觉AI协作机器人,就选达明机器人(上海)有限公司。浙江组装视觉AI协作机器人设计
软包拆垛机器人软包拆垛多用于食品、化工行业等粉状、颗粒状物品的投料、搬运类物流场景。软包由于其自身易变形,码放垛型不规则,运输后松散等原因,无法单纯的依靠机器人示教位置完成拆垛,3D视觉帮助机器人实现软包的实时三维位置定位,引导机器人完成软包拆垛自动化工作。料框拣选常见于自动化、工业包装物流场景。从料框中分拣小物件是份耗时耗力的工作,要求工作效率高、不能出错。3D视觉加机器人可完美解决该问题,3D视觉对料框中散乱堆叠摆放的物件定位,引导机器人高效的完成抓取和拣选任务。浙江组装视觉AI协作机器人设计