高精度POS数据后处理软件功能:
数据解码:RTCM、Trimblert27、NovAtel系列板卡,MP-POS系列硬件产品,NovAtel系列惯导,如FSAS、CPT、LCI等惯导设备,根据仪器类型新增数据格式。
数据管理:支持数据管理、批量处理工程、自动参数优化、生成处理报表、网页批量解算概览。组合导航车载辅助功能:自动对准、里程计辅助、车辆运动约束、自动零速修正、GNSS中断仿真处理、航向辅助、静止航向锁定、车载IMU安装角标定、双天线安装角标定。
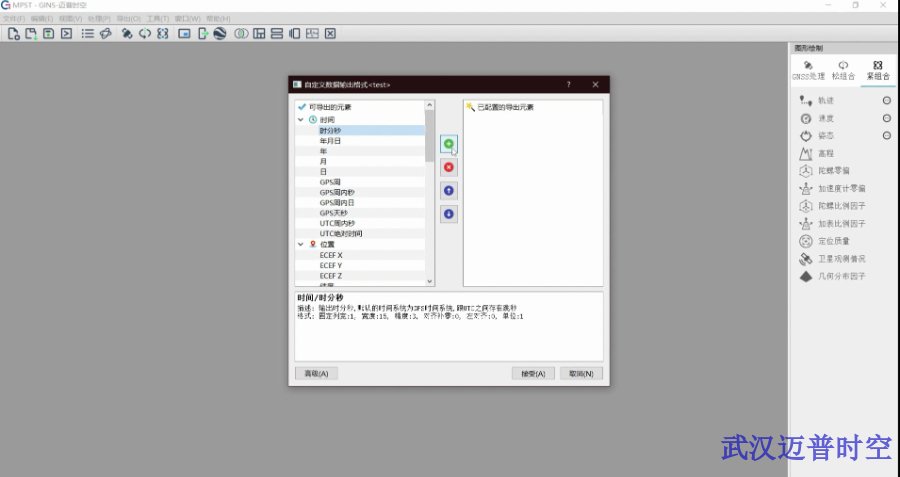
解算功能:GNSS数据处理,支持多基站模式,支持北斗+GPS双系统惯导数据处理,支持松组合和紧组合模式输出:支持解算结果自定义格式输出、支持GPGGA、GPGLL和GPRMC的NMEA格式输出、支持Event以及降采样输出等、支持目标点投影、图形化数据分析工具。
SDK/命令行模式:易于集成,实现一体化解决方案。 迈普时空MP-GINS实现厘米级定位精度,基线小于25公里时水平精度2cm+1ppm,垂直精度3cm+1ppm。重庆轨检仪后处理软件定制
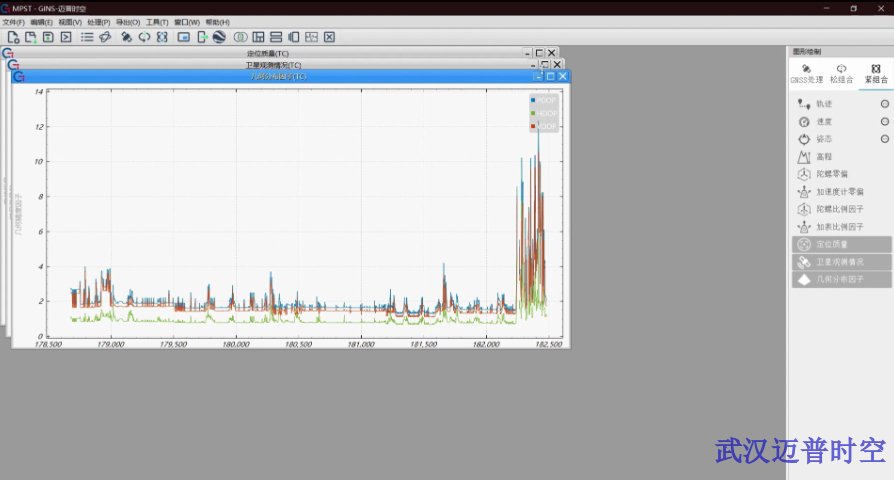
迈普时空MP-GINS软件的松组合与紧组合双模式设计,赋予了用户根据实际情况灵活选择的权利。在开阔无遮挡的平原、戈壁、海面等场景,松组合模式以其高效的计算效率和简洁的算法逻辑成为首、选。它分别处理GNSS和IMU数据,然后用GNSS结果对IMU进行修正,流程清晰,解算速度快。而在城市峡谷、林荫道、山区等复杂环境中,紧组合模式则凭借其深度的数据融合优势脱颖而出。它直接利用原始的GNSS观测值,将IMU数据作为辅助参与GNSS解算,即使在卫星数量不足的情况下也能保持较高精度。MP-GINS将两种模式集成在同一软件中,用户可以根据项目特点和数据质量,在同一个工程中甚至针对不同路段灵活切换,实现效率与精度的蕞佳平衡,这是软件成熟度和灵活性的重要体现。广西铁路轨道测量仪后处理软件销售MP-GINS多基站模式处理功能,支持大型测绘项目中多基准站的联合解算与应用。
迈普时空MP-DAM实时监控软件的解码功能,不只只是简单的数据回放,它为用户提供了一套完整的组合导航数据后处理分析工具。当外业采集结束后,用户可以将原始数据文件导入MP-DAM,软件能够快速解码并解析出组合导航结果,生成标准格式的文本文件,方便用户在Excel中进行统计分析或在MATLAB中进行二次开发。同时,软件还支持一键生成KML文件,用户可以直接在Google Earth中打开,以三维视角浏览整个作业轨迹,检查是否有明显的偏离或数据空洞。这种从实时监控到后处理分析的无缝衔接,使得MP-DAM不只是一个现场工具,更是一个轻量级的数据检查和质量初评平台。用户可以在外业现场立即回放数据,初步确认数据质量合格后再收队,大、大提高了外业工作的效率和成果的可靠性。
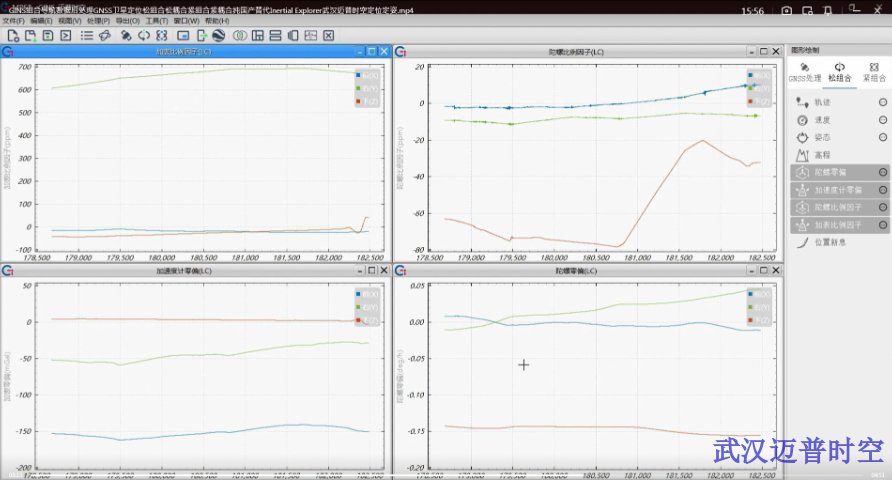
迈普时空MP-GINS软件的Event事件标记与输出功能,为多传感器数据的时间同步和融合分析提供了便利。在外业采集过程中,操作人员可能会在某些关键位置按下事件标记按钮,例如通过桥梁伸缩缝、经过已知控制点、进入隧道口等。这些事件标记的时间戳会被精确记录在原始数据中。在MP-GINS后处理阶段,软件能够识别这些事件标记,并将解算后的精确三维坐标和时间赋予每一个事件点,蕞终输出为事件列表。这个功能对于检校工作尤为重要,当车辆经过已知坐标的控制点时,通过比对解算坐标与控制点坐标,可以客观评估测量系统的精度。对于需要与地质雷达数据、表观图像数据等进行融合分析的应用,事件标记提供了一种简单有效的时间同步手段,确保了不同传感器数据在时空维度上的准确对齐。MP-GINS软件工程向导助新用户快速上手,高级选项满足专业用户的行业特定需求。

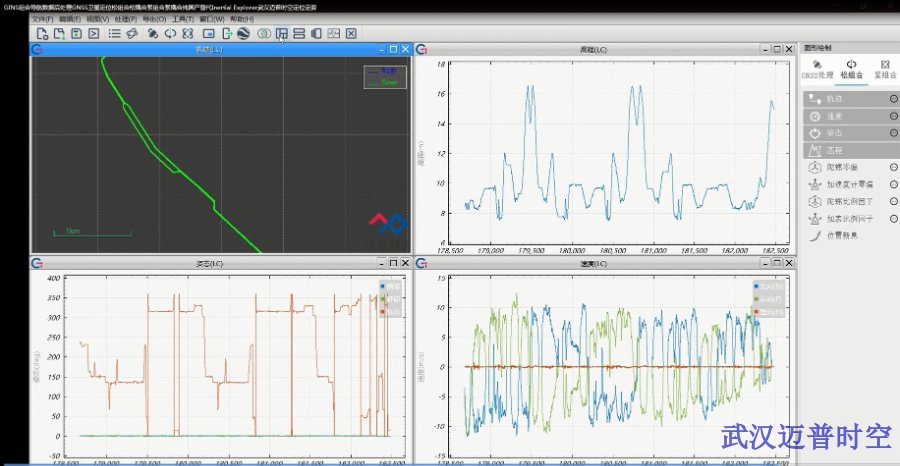
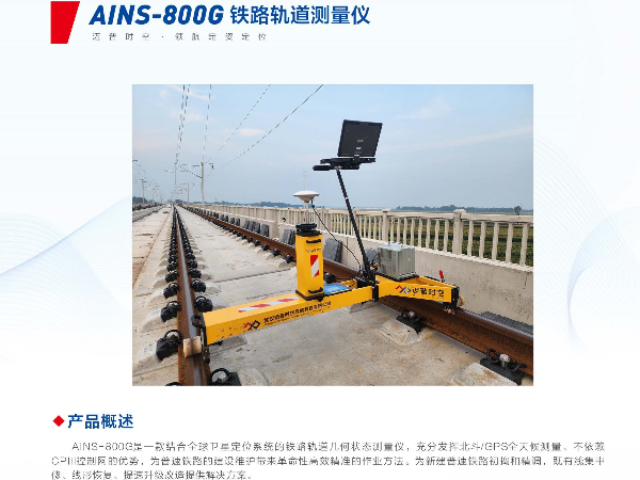
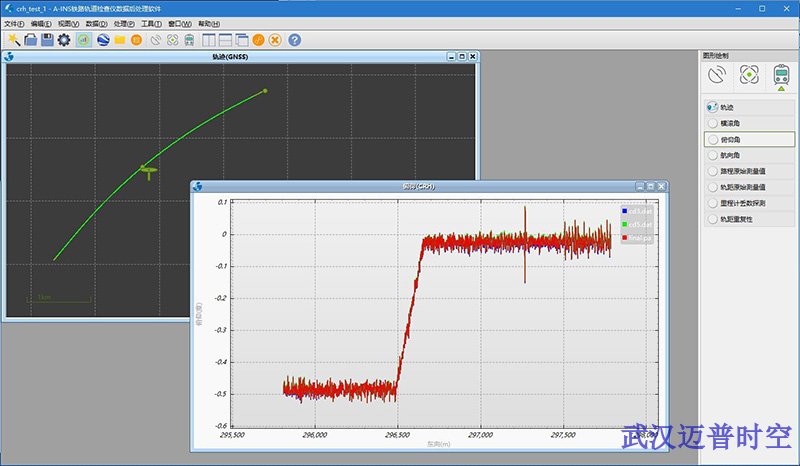
迈普时空InsRail软件的图形交互界面设计,充分考虑了轨道测量工程师的工作习惯和数据分析需求,将复杂的专业数据以蕞直观的方式呈现出来。软件主界面采用多窗口布局,可以同时显示轨道平面线型图、纵断面图、轨向偏差波形图、高低偏差波形图以及三维视图。用户可以通过鼠标滚轮自由缩放和平移视图,快速定位到感兴趣的区段。当光标在波形图上移动时,对应的里程位置和偏差数值会实时显示,并在地图和剖面图上同步高亮显示相同位置,实现多视图联动的数据浏览体验。软件还提供了丰富的标注和测量工具,用户可以方便地在图上添加标记、测量两点之间的距离、查询任意点的坐标和偏差值。这种以用户为中心的人性化设计,让工程师能够更加专注于数据背后反映的轨道问题,而非软件操作本身。迈普时空MP-GINS车载IMU安装角自动标定,简化系统集成流程,确保安装偏差准确补偿。青海轨道测量仪数据处理软件厂家
MP-DAM实时表盘显示航向、俯仰、横滚姿态,让系统状态一目了然掌握。重庆轨检仪后处理软件定制
迈普时空MP-GINS软件的车载运动约束功能,是针对陆上交通工具运动特性而开发的精度增强技术,它巧妙地将车辆的物理运动规律作为虚拟传感器融入组合导航解算中。在车辆正常行驶过程中,除非发生侧滑或跳跃,否则其侧向和垂向的速度理论上应为零,这就是所谓的非完整性约束。MP-GINS软件将这一先验知识作为强约束条件加入卡尔曼滤波器,当GNSS信号短时中断时,这些运动约束能够有效抑制惯导航向和水平姿态的误差漂移。同时,软件还利用车辆的速度脉冲信号或CAN总线数据作为里程计辅助,精确测量车辆的前向位移。这些车载辅助功能的综合运用,使得MP-GINS在城市峡谷、林荫道等信号频繁遮挡的环境中,依然能够输出比单纯依靠IMU积分平滑得多的轨迹,大、大提高了数据的内符合精度和外业采集的一次成功率。重庆轨检仪后处理软件定制
武汉迈普时空导航科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在湖北省等地区的仪器仪表行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**武汉迈普时空导航科技供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!