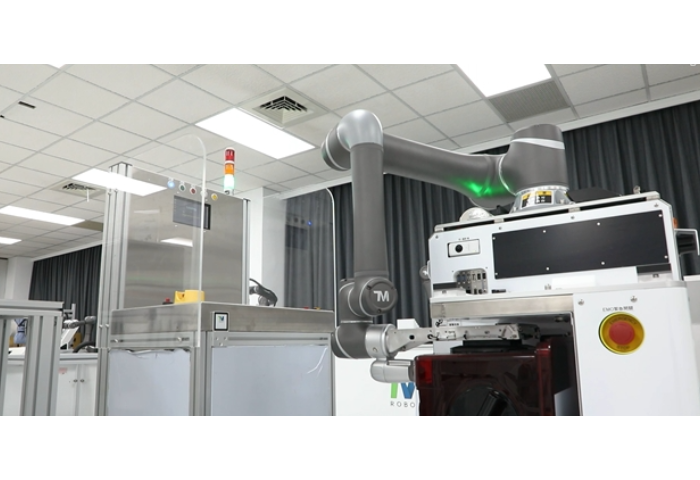
协作机器人是指:被设计成可以协作区域内与人直接进行交互的机器人协作机器人能够实现许多不同应用程序的自动化。它体积小巧轻便,可以轻松地在工作区域内移动到不同的岗位进行操作。它易于编程,用户可以保存程序,以便重复使用。它精度高,可以满足更加精细的产品。协作机器人是一种非常小巧灵活的工具,可以像人类手臂一样执行动作,它具有更的移动空间,它不会感到疲劳,可以代替人类做一些重复性,危险性的工作。在3C电子行业中协作机器人具有的应用,例如组装、螺丝锁缚、搬运测试、机床上下料等,还有更多未知的等待着去探索应用。 达明机器人(上海)有限公司为您提供AI协作机器人,有想法的不要错过哦!智能AI协作机器人工作原理
不同力感知形式的机器人力感知是协作机器人实现交互的基本功能,也是重要的功能之一。主要分为电流环、关节扭矩、六维力/力矩传感器(简称六维力传感器)、电子皮肤这四种感知形式。其中,基于电流环的感知形式是早期的一种,通过机器人的伺服系统直接获取机器人各关节电机电流,再通过电机厂商提供的转矩系数,计算出各关节的输出力矩。这种方法经济简单,在机器人本体厂商中使用。由于无法获取精确的外力,常用于碰撞检测以及简单的拖动示教。深圳涂胶AI协作机器人定制达明机器人(上海)有限公司为您提供AI协作机器人。

制定指导准则有助于帮助运行人员在各种应用中评估机器人在执行给定任务时的安全性。尽管在设计时就考虑了协作机器人的人机交互性,但风险评估后仍然可能需要添加其它缓解措施。这些风险评估必须考虑机器人与运行人员互动的所有方式,周围环境的哪些方面可能导致夹紧或卡住,以及机械手臂末端工具的哪些特征可能因高温、锋利的边缘或其它危险而造成风险。肯倍机器人持续提升机器人技术,持续质提量增成本降,赋能:机器人+社会的快速到来,成为机器人+社会形态的重要参与者和建设者。
协作机器人与工业六轴机器人还有一些明显的区别。它们的设计目的是围绕人工作,与普通工业类型不同。此外,协作机器人更容易与非专业人士交互,包括重新编程和调整机器人的参数。开发环境通常也是图形化和直观的,这与工业机器人更复杂的开发环境相反。与其他工业机器人相比,协作机器人也很轻。这使得它们可以与移动机器人配对,在动态环境中执行任务。协作机器人可能会在一段时间内执行机器维护任务。然后,当其他地方需要时,移动机器人会将协作机器人运送到另一个区域。此时,它可以执行下一个任务。这使协作机器人能够更加灵活地改善您的生产环境。 达明机器人(上海)有限公司是一家专业提供AI协作机器人的公司,欢迎新老客户来电!

从技术上讲,协作机器人可以是任何形式的机器人。然而,六轴设计是几乎所有协作机器人都可以商用的形式。这种设计使协作机器人为的应用做好了准备。协作机器人与工业六轴机器人还有一些明显的区别。它们的设计目的是围绕人工作,与普通工业类型不同。此外,协作机器人更容易与非专业人士交互,包括重新编程和调整机器人的参数。开发环境通常也是图形化和直观的,这与工业机器人更复杂的开发环境相反。与其他工业机器人相比,协作机器人也很轻。这使得它们可以与移动机器人配对,在动态环境中执行任务。协作机器人可能会在一段时间内执行机器维护任务。然后,当其他地方需要时,移动机器人会将协作机器人运送到另一个区域。此时,它可以执行下一个任务。这使协作机器人能够更加灵活地改善您的生产环境。 AI协作机器人,就选达明机器人(上海)有限公司,让您满意,欢迎您的来电!北京AOI检测AI协作机器人图片
达明机器人(上海)有限公司是一家专业提供AI协作机器人的公司,有想法的不要错过哦!智能AI协作机器人工作原理
协作机器人是视觉与机器人的集成,机器人不再是被动的指定地点搜寻,而是眼观四路,耳听八方,只要进入视野内的物体都可以被捕捉到,所见即所得。其次就是强大的智能图像处理能力了,能自行搜寻所需目标。其实在当前已经有实际的所见即所得的需求,比如协作机器人+AGV的组合做物料的转运,当物料摆放位置随意时,机器人就可以采用搜寻动作,而不是拍个照看一下,再调整位置,再拍个图看一下。自动驾驶,人形机器人,大小狗也是如此。 智能AI协作机器人工作原理