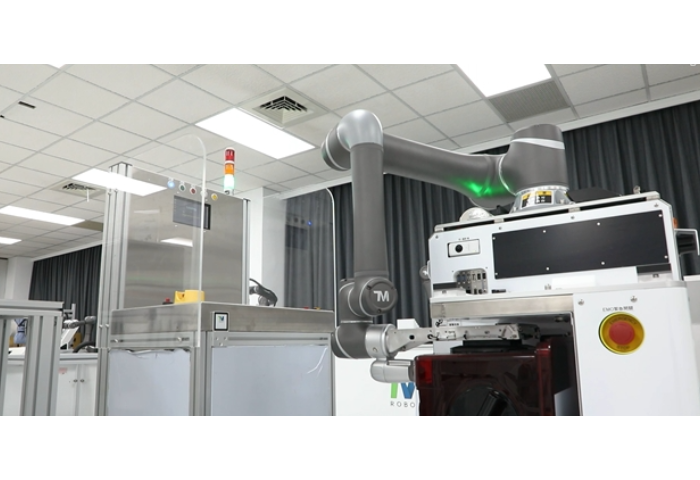
导入达明自带视觉协作机器手臂-TM12M及TM landmark ,复合机器人也可轻松应用在精精度作业站别, 并且也可以十分轻松地完成调试及复制空间定位精度±0.5mm ( AGV 定位精度±5mm ; 通过TMvision + TM Landmark,将空间定位精度做到±0.5mm以内);达明机器人通过Eye in Hand / New Base (Golden Port) 快速教点,轻松地完成调试及复制。平稳取放,非常适用于医疗及半导体等行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性、精度的应用致力于研发和应用自动化科技,以创的自带智能视觉结合手臂,加上AI+人工智能系统,手眼脑合一,提升机器人能力、弹性与易用度,协助企业大幅降低导入自动化人力与时间成本。复合机器人,就选达明机器人(上海)有限公司,用户的信赖之选,有需求可以来电!辽宁智能工厂复合机器人控制

一般复合机器人应用场景较为复,在特定场景下不仅需要进行挪动运送上料任务,又需要添加生产线担负实际技术工种加工的实际操作,因而,复合机器人针对AGV小轿车环境适应能力具有很的规定。复合型运送机器人机械手臂包括了多骨关节机器人、直角坐标系机器人、SCARA机器人及协作机器人等,相对来说,AGV+协作机器人(也称之为复合机器人)更加精细化管理,可以可用更加复杂、精密的生活环境,可以穿行各种各样应用场景而且做相对性工作,相对性传统式机器人更加效,深受销售市场关心。北京上下料复合机器人制作复合机器人,就选达明机器人(上海)有限公司,用户的信赖之选,欢迎您的来电!

复合机器人乃是手脚并用,将这两种作用组合在一起。复合型工业生产AGV复合机器人主要用途在3C电子器件、半导体材料、诊疗、日化品、机械加工等领域的特殊应用场景中,AGV复合机器人运用比较完善,可是销售市场生产厂家不多,AGV+机械手臂复合机器人的一个难题之一就是技术性,协作机器人加AGV配置,不仅需要开发企业对二者技术性都灵活运用之外,如何能让其协调工作、稳定的工作也是要攻破的难题之一。复合机器人以度的灵活性完成下一个过程。多个复合材料机器人形成移动装配平台,加工平台可以形成度协作。机器人和合作机器人企业抢占市场,这也是两种机器人快速增长的主要原因。
基于智能移动机器人、协作机器人、视觉识别等技术的综合应用。可快速布置于自动化工厂、仓储分拣、自动化货物超市,实现物料自动搬运、CNC上下料、自动分拣等功能。 技术规格: 常规负载:20kg 运行速度:0.5/0.8m/s 手臂末端综合作业精度:<0.5mm 定位技术:Mark定位 导航:激光导航 人工智能:人工智能技术可以帮助机器人进行决策和规划。通过机器学习、深度学习等技术,机器人可以自主地学习并实现自主规划,实现更加复杂的任务。 控制系统:控制系统可以帮助机器人控制其运动和行为。控制系统通常由计算机程序和电子设备组成,可以让机器人实现精度的运动和行为控制。达明机器人(上海)有限公司致力于提供复合机器人,有想法的可以来电!

提生产过程的自动化水平 复合材料机器人有利于提原材料和配件运输、工件装卸和机器组装的自动化程度,提劳动生产率,降低生产成本,加快工业生产的机械化和自动化。 改善工作条件,避免人身事故 复合机器人可以在恶劣环境中安全地完成一些或所有危险操作,改善了工人的工作条件。同时,一些简单但繁琐的搬运工作可以用复合机器人代替,这可以避免人们因操作疲劳或疏忽而造成的损失。 生产线的灵活性 复合机器人以度的灵活性完成下一个过程。多个复合材料机器人形成移动装配平台,加工平台可以形成度协作。机器人和合作机器人企业抢占市场,这也是两种机器人快速增长的主要原因。复合机器人,就选达明机器人(上海)有限公司,让您满意,有想法可以来我司!吉林3D复合机器人机构
达明机器人(上海)有限公司致力于提供复合机器人,有需求可以来电!辽宁智能工厂复合机器人控制
协作机器人可以简化物料搬运、分拣、上下料和装箱操作,将工人从单一枯燥且繁重的工作中解放出来。再通过达明机器人集成创夹具及视觉,即使在非结构化环境中,达明机器人也能识别、拾取各种物体,部署于复杂度更的自动化生产流程中。且达明机器人易于编程,用户更可以通过其示教器快速部署任务,非常适合小批量应用以及重复性任务。配合车载装卸机构,可自动装载货物,无轨AGV小车自动行驶指定位置,机械手自动卸货,并放置到制定位置。可快速布局于自动化工厂、仓储分拣、自动化货物超市,实现物料自动搬运、物品上下料、物料分拣等。 辽宁智能工厂复合机器人控制